Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
Published:
Published:
ps -A | grep apt
kill -9
rm -f /var/lib/dpkg/lock
rm -f /var/cache/apt/archives/lock
rm -f /var/lib/apt/lists/lock
Published:
Published:
Published:
Published:
Published:
Published:
Published:
Published:
Published:
Published:
Published:
Published:
Published:
Published:
Published:

Published:
这篇blog会对个人探索的双目mapping的一些方法进行描述
Published:
Published:
Published:
The autonomous driving simulation platform which connect baidu apollo system and uisee driving system 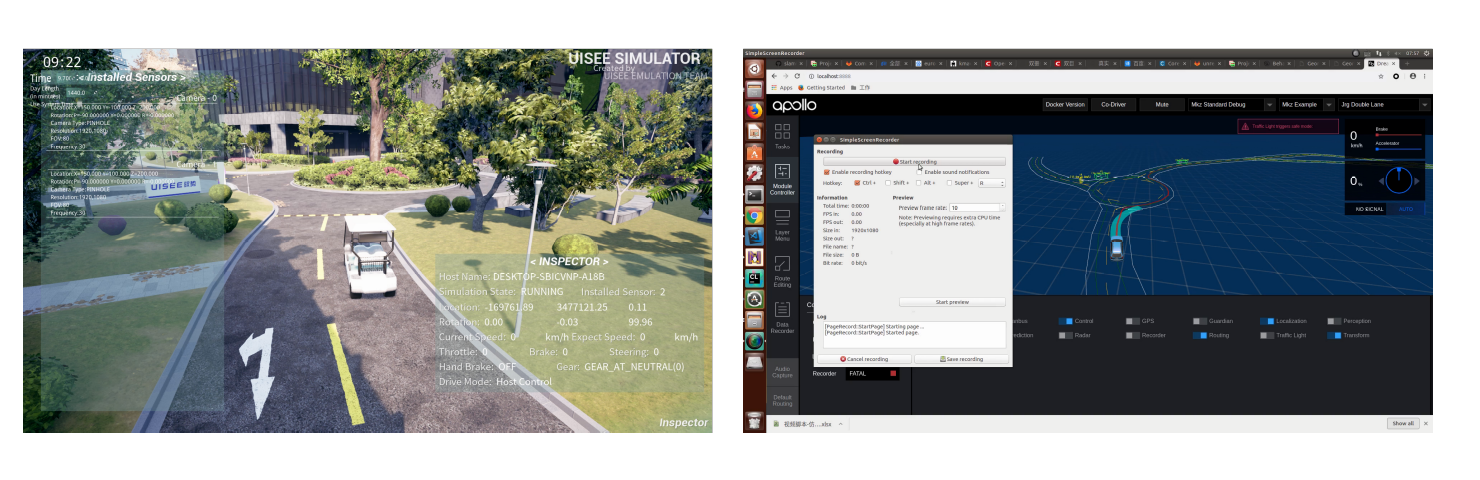
The autonomous driving simulation AI Car routing method 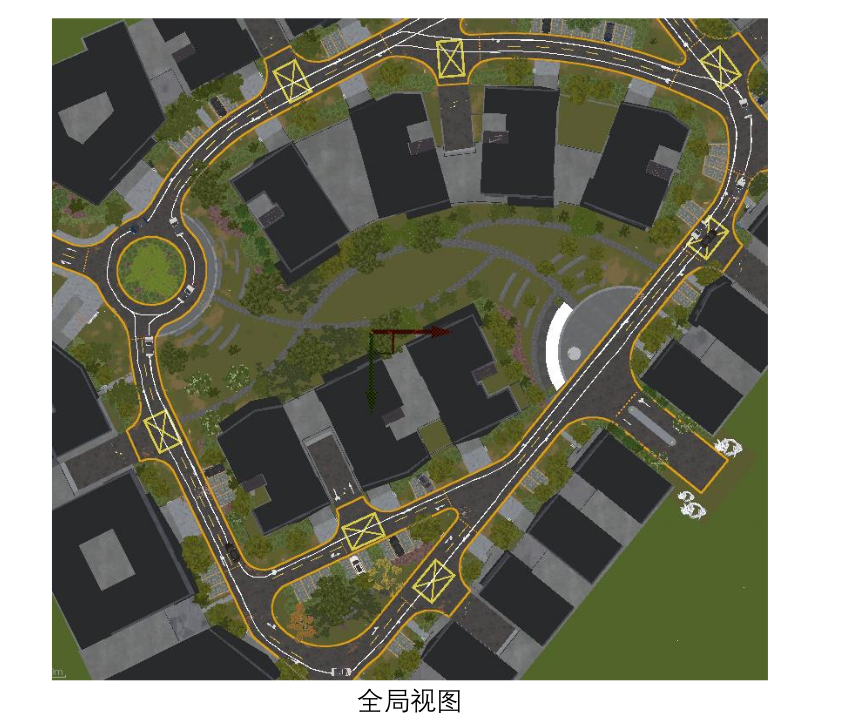
The autonomous driving localization system based on hdmap 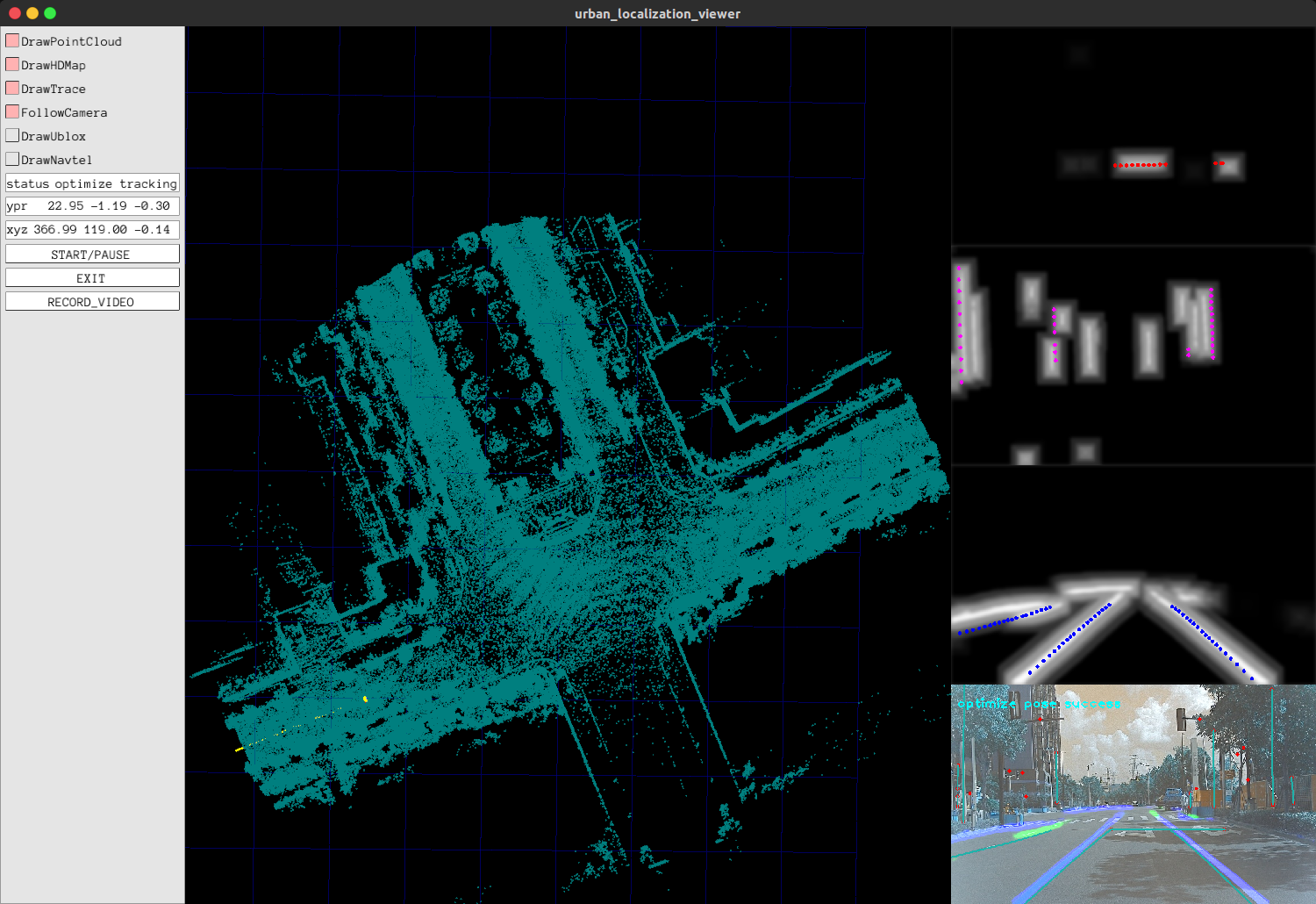
extrinsic parameters calibration system based on photometric consistence (direct method in vslam) 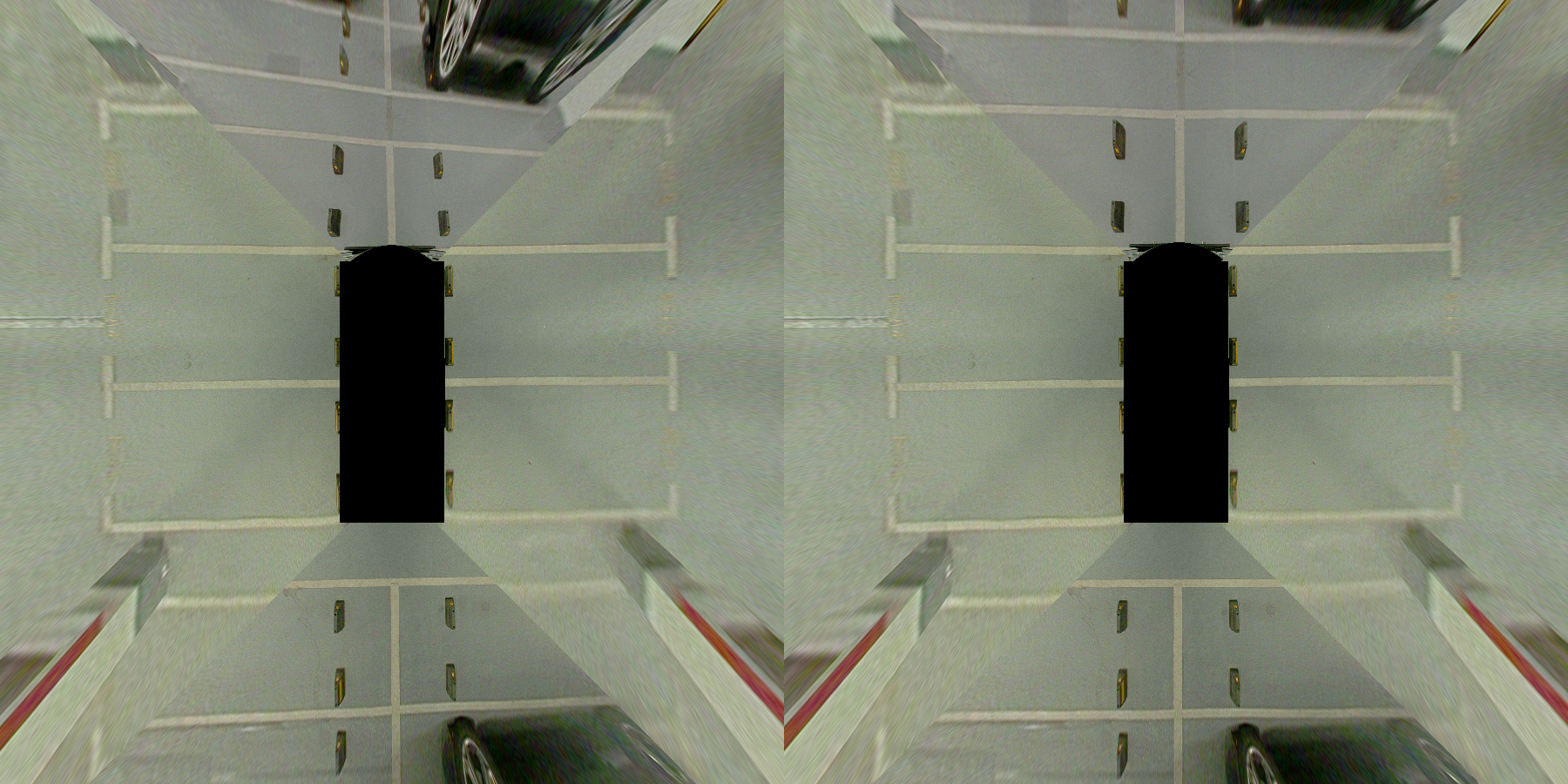
Published in , 1900
本发明涉及无人驾驶、视觉定位技术领域,具体来说是一种基于语义边缘对齐的由粗到精的多传感器融合定位方法,包括获取高精地图、原始图像、消费级的车载GPS以及轮子里程计的步骤,本发明是一种低成本的以视觉传感器为主的高精定位方法,通过融合里程计和车载GPS信息获得鲁棒的定位结果,通过提取图像中稳定的语义特征,进行语义边缘对齐来得到车辆位姿的估计,对齐的方式不需要显式的进行三维地图特征和二维图像特征的数据关联,而是隐式的通过最小化投影点的光度残差来进行位姿的估计。
Published in ELECTRONIC MEASUREMENT TECHNOLOGY, 2017
图像中椭圆形测量标志点的自动提取方法
Download here
Published in 2017 International Symposium on Planetary Remote Sensing and Mapping, 2017
The paper proposes an on-orbit attitude estimation method of star sensors and gyro based on Complementary Filter (CF) and Unscented Kalman Filter (UKF).
Download here
Published in 枫林学苑, 2017
关于基于无线通信基站的室内定位数学解决方法
Download here
Published in Journal of Tongji University, 2018
This paper presents a practical novel approach for tilt measurement of ancient pagodas and the criterion quality evaluation.
Download here
Published in Master Thesis, 2018
satellite attitude estimation method
Download here
Published in , 2019
patent.
Download here
Published in IEEE Transactions on Geoscience and Remote Sensing, 2019
This paper presents a novel illumination-robust subpixel Fourier-based image correlation method based on phase congruency.
Download here
Published in https://udel.edu/~ghuang/iros19-vins-workshop/, 2019
Download here
Published in , 2019
patent.
Download here
Published in , 2021
vision localization
Download here
Published in , 2022
patent.
Download here
Published in , 2022
patent.
Download here
Published in , 2022
patent.
Download here
Published in , 2022
patent.
Download here
Published in , 2022
patent.
Download here
Published in , 2022
patent.
Download here
Published in , 2022
patent.
Download here
Published in , 2022
patent.
Download here
Published in , 2022
patent.
Download here
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.