Read Paper Collection
Published:
Vision Localization
- Monocular Localization in HD Maps by Combining Semantic Segmentation and Distance Transform (IROS 2020, KIT)
- Road Mapping and Localization using Sparse Semantic Visual Features (ICRA 2021, Alibaba)
- Compact 3D Map-Based Monocular Localization Using Semantic Edge Alignment (IROS 2021, Alibaba)
- Monocular Localization with Vector HD Map (MLVHM): A Low-Cost Method for Commercial IVs (Sensors, 2020)
- Long-Term Urban Vehicle Localization Using Pole Landmarks Extracted from 3-D Lidar Scans (2019)
- DA4AD: End-to-End Deep Attention-based Visual Localization for Autonomous Driving (ECCV 2020)
- Exploiting Sparse Semantic HD Maps for Self-Driving Vehicle Localization (IROS 2019, Uber.ATG)
- Lane Endpoint Detection and Position Accuracy Evaluation for Sensor Fusion-Based Vehicle Localization on Highways (Korean, 2018, sensors)
- Visual Semantic Localization based on HD Map for Autonomous Vehicles in Urban Scenarios (ICRA 2021, Huawei)
- HDMI-Loc:Exploiting high definition map image for precise localization vis bitwise particle filter (IROS 2020)
- DT-Loc: Monocular Visual Localization on HD Vector Map Using Distance Transforms of 2D Semantic Detections (IROS 2021)
Crowdsourced Mapping
- Real-Time HD Map Change Detection for Crowdsourcing Update Based on Mid-to-High-End Sensors (sensors 2021)
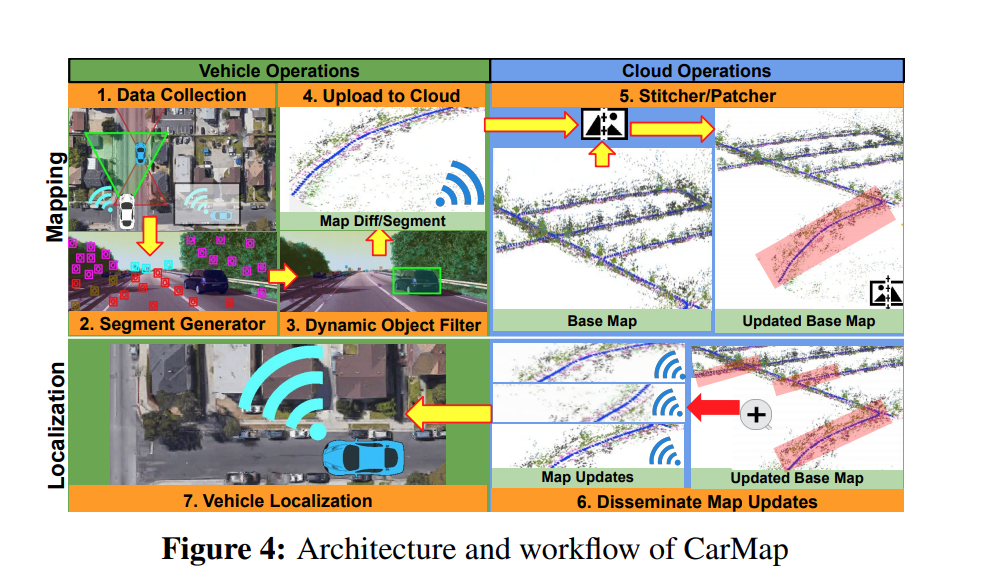
- CarMap: Fast 3D Feature Map Updates for Automobiles
nvidia drive mapping ecosystem (material in files folder)
here edge live mapping (material in files folder)
Lidar Localization
Tightly-Coupled Multi-Sensor Fusion for Localization with LiDAR Feature Maps (tusimple, ICRA 2021) (联合了lidar的几何特征和normal distributation feature, 融合了imu, wheel encoder等信息)
Direct LiDAR Odometry: Fast Localization with Dense Point Clouds (新颖的submapping method, keyframes association, FAST-GICP + NANO-FLANN)
CoFi: Coarse-to-Fine ICP for LiDAR Localization in an Efficient Long-lasting Point Cloud Map
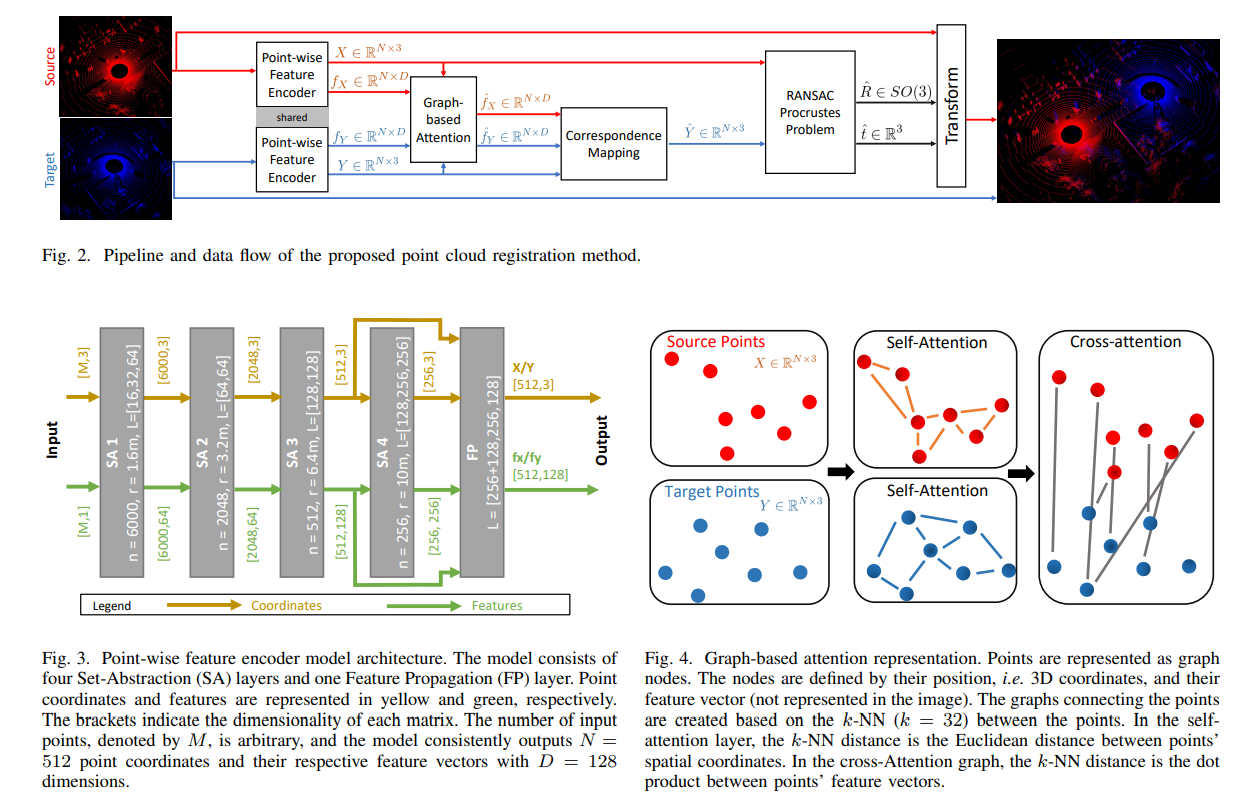
Fast and Robust Registration of Partially Overlapping Point Clouds
Patchwork++: Fast and Robust Ground Segmentation Solving Partial Under-Segmentation Using 3D Point Cloud
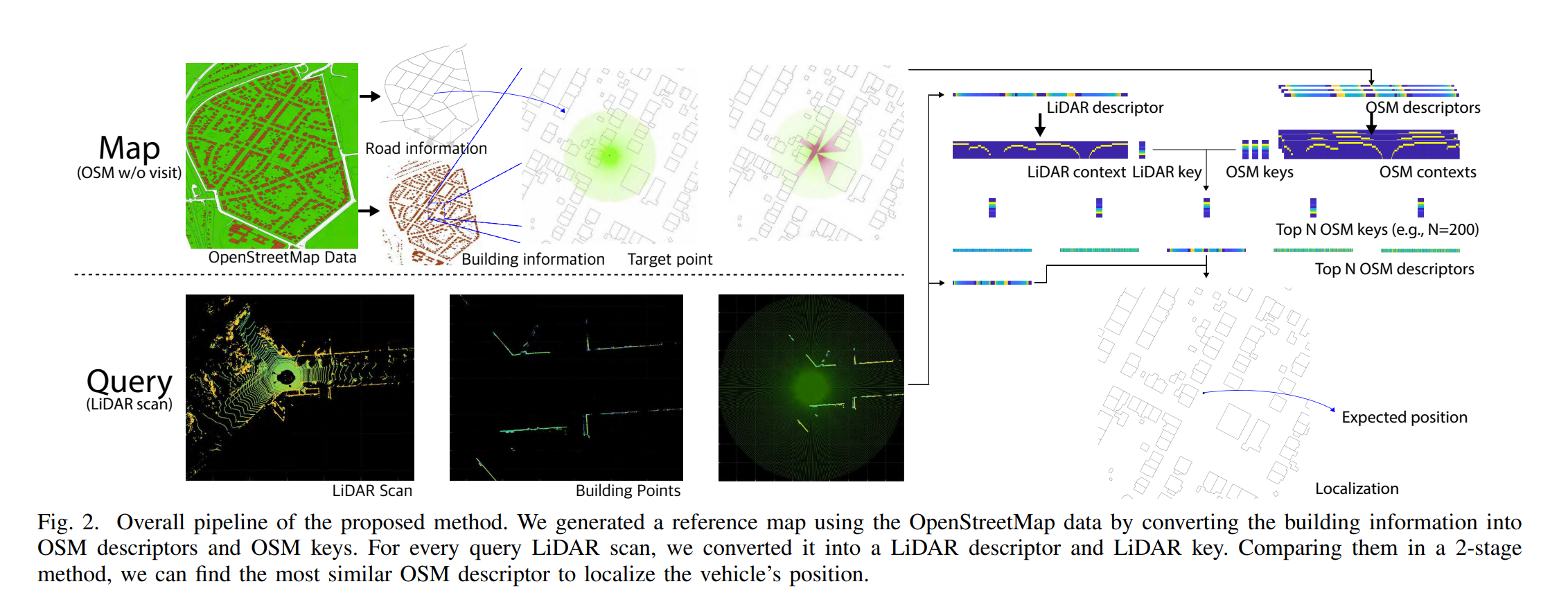
OpenStreetMap-based LiDAR Global Localization in Urban Environment without a Prior LiDAR Map 对lidar scan和osm map分别生成描述子,进行匹配定位
SLAM
- CamVox: A Low-cost and Accurate Lidar-assisted Visual SLAM System (2020, SUST)
- TIMA SLAM: Tracking Independently and Mapping Altogether for an Uncalibrated Multi-Camera System (Sensors 2021)
- Structure-from-Motion Revisited (CVPR 2016)
- OV2SLAM : A Fully Online and Versatile Visual SLAM for Real-Time Applications (ICRA 2021)
- Generalizing to the Open World: Deep Visual Odometry with Online Adaptation (CVPR 2021)
- LVI-SAM: Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping (ICRA 2021)
- LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping (IROS 2020)
- RoadMap: A Light-Weight Semantic Map for Visual Localization towards Autonomous Driving(ICRA 2021)
- PicoVO: A Lightweight RGB-D Visual Odometry Targeting Resource-Constrained IoT Devices (ICRA 2021) (edge based vo use edges as illumination-robust features and track them through image alignment upon Distance Transform)
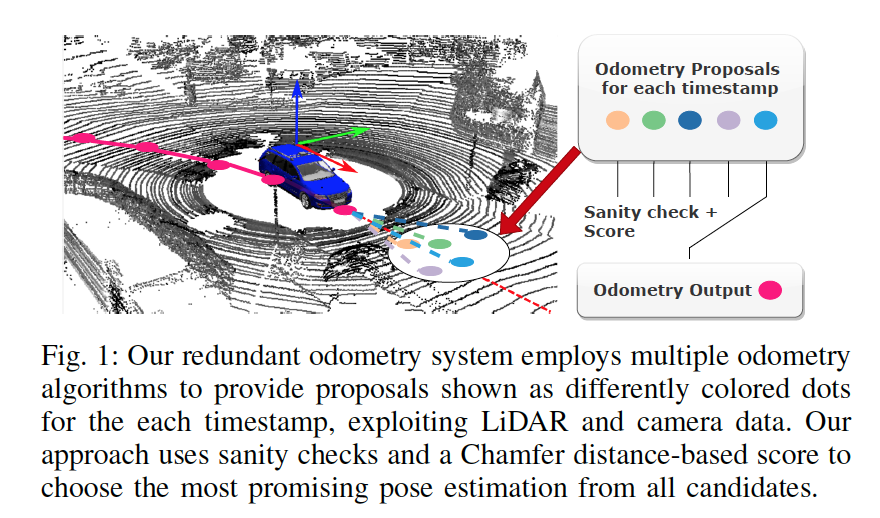
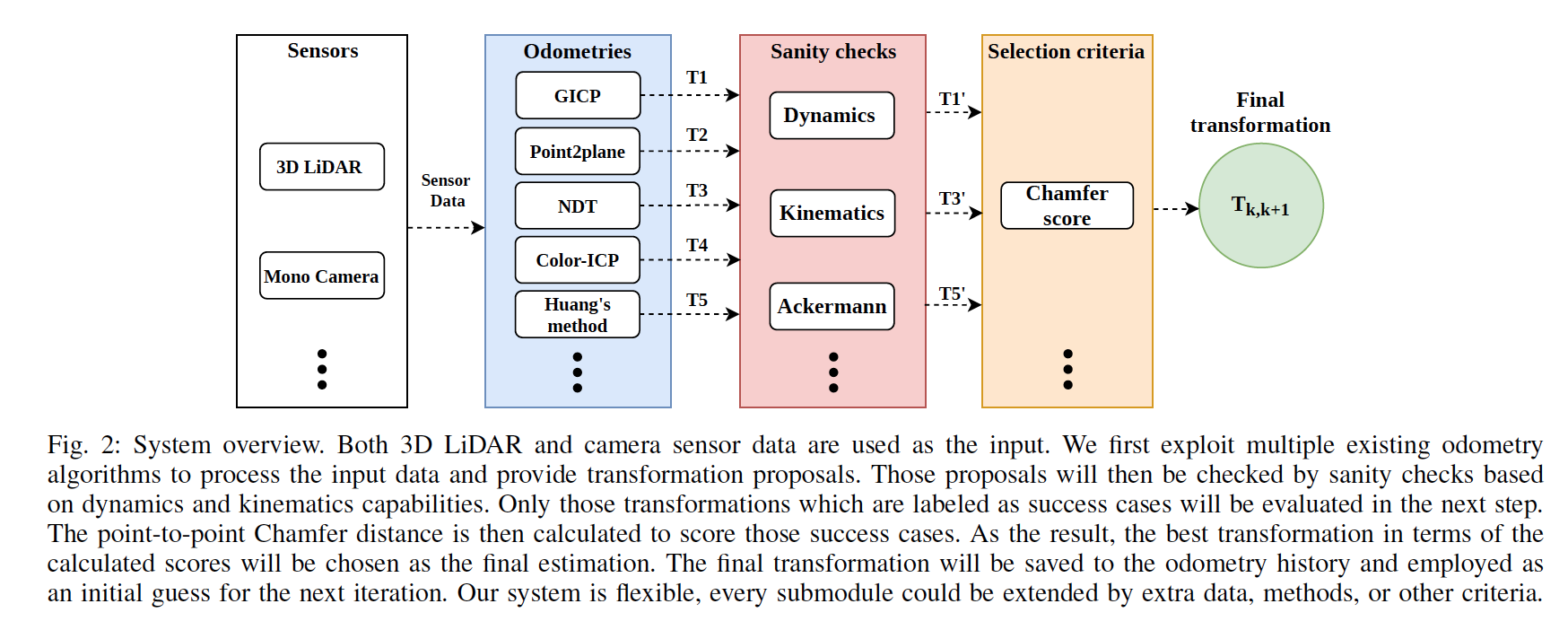
- Simple But Effective Redundant Odometry for Autonomous Vehicles (ICRA 2021)
- AVP-SLAM: Semantic Visual Mapping and Localization for Autonomous Vehicles in the Paarking Lot (IROS 2020)
- DynPL-SVO: A New Method Using Point and Line Features for Stereo Visual Odometry in Dynamic Scenes
- Lightweight Semantic Mesh Mapping for Autonomous Vehicles (ICRA 2021)
- Submap-Based SLAM for Road Markings(kit, 2017)
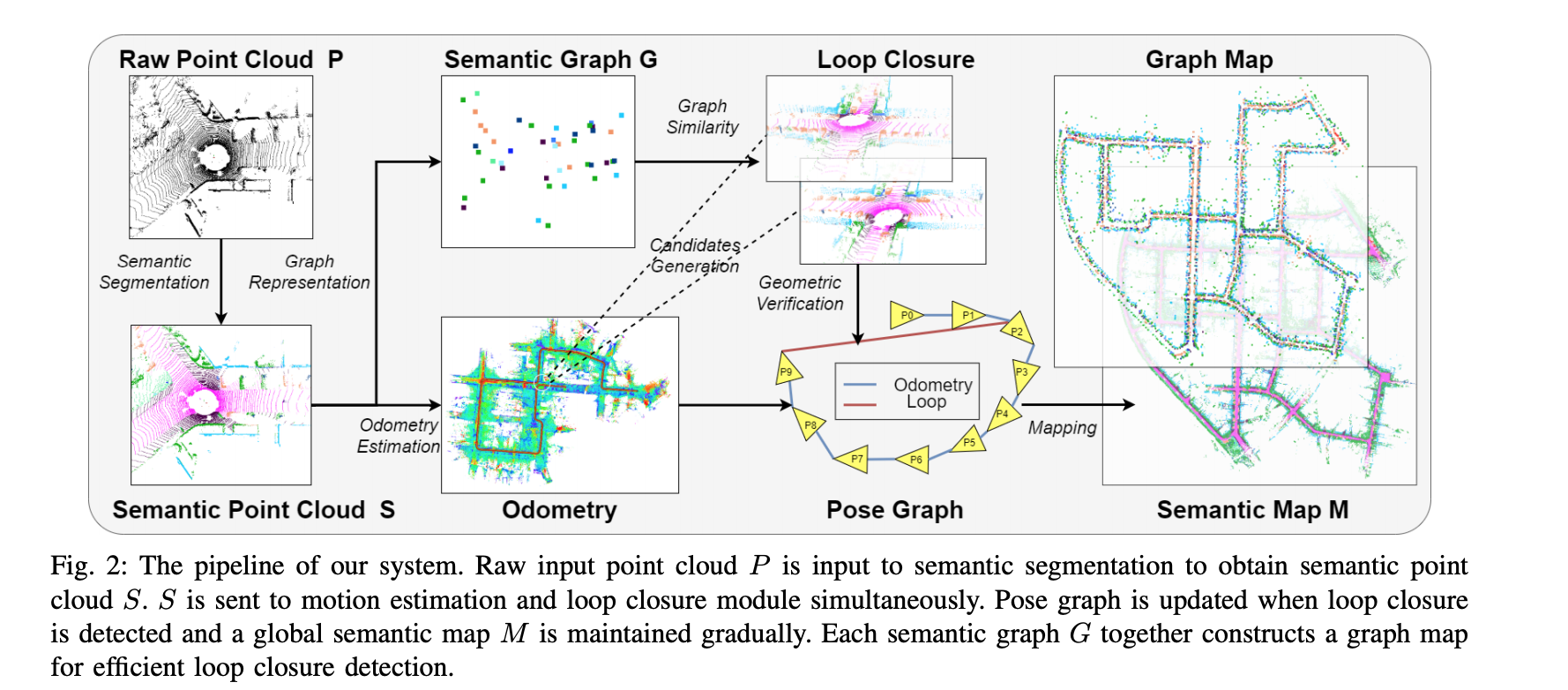
- SA-LOAM: Semantic-aided LiDAR SLAM with Loop Closure
- EDPLVO: Efficient Direct Point-Line Visual Odometry
MetroLoc: Metro Vehicle Mapping and Localization with LiDAR-Camera-Inertial Integration
A decentralized framework for simultaneous calibration, localization and mapping with multiple LiDARs
统一的状态,多机执行各自的EKF, 通过网络进行状态通信
- A General Framework for Lifelong Localization and Mapping in Changing Environment
利用chow-liu spanning tree 对pose graph进行稀疏化 (remove submap的边缘化会引起dense fill in)
DSOL: A Fast Direct Sparse Odometry Scheme
Vision-based Large-scale 3D Semantic Mapping for Autonomous Driving Applications
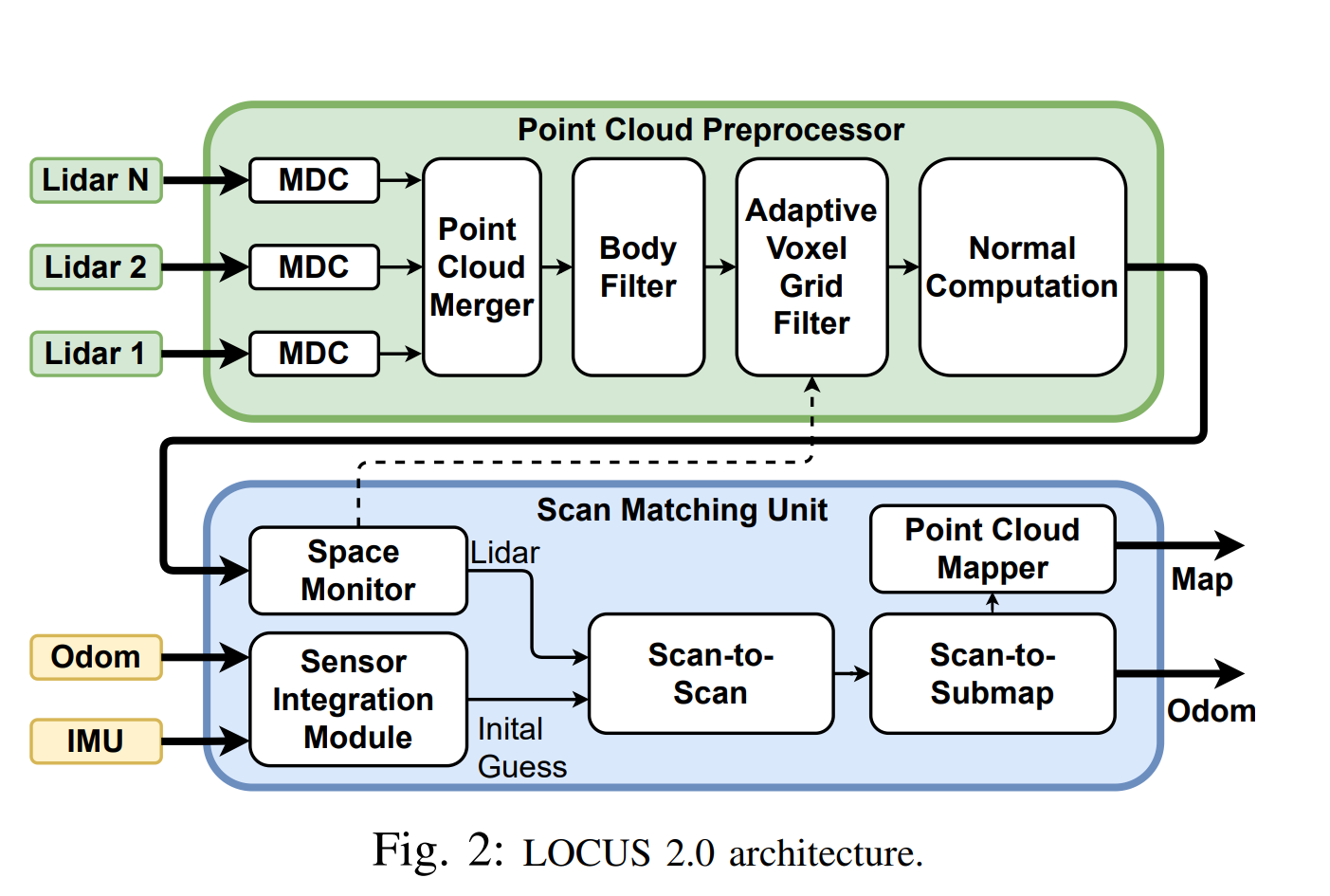
LOCUS 2.0: Robust and Computationally Efficient Lidar Odometry for Real-Time 3D Mapping
Nonlinear Optimization of Multimodal 2D Map Alignment with Application to Prior Knowledge Transfer (非刚性alignment, distance transform, gradient map)
面向无人系统的大规模场景三维重建 (申老师) download file here
Calibration
- Online Camera-LiDAR Calibration with Sensor Semantic Information (IROS 2020, Pony.ai)
- A Novel AVM Calibration Method Using Unaligned Square Calibration Boards (Sensors, 2021)
- Automatic Calibration of an Around View Monitor System Exploiting Lane Markings (Sensors, 2018)
- LiDAR-Camera Calibration using 3D-3D Point correspondences (2017)
- Online camera pose optimization for the surround-view system (Tongji, 2019, zhanglin)
BEV Perception
- Lift, Splat, Shoot: Encoding Images from Arbitrary Camera Rigs by Implicitly Unprojecting to 3D (ECCV 2020)
- Orthographic feature transform for monocular 3D object detection (2019 BMVC)
- BEVSegFormer: Bird’s Eye View Semantic Segmentation From Arbitrary Camera Rigs
- VectorMapNet: End-to-end VectorizedHD Map Learning
- Associative Embedding: End-to-End Learning for Joint Detection and Grouping
LocalMap
- Augmenting Lane Perception and Topology Understanding with Standard Definition Navigation Maps (2022 NVIDIA)
- Traffic Flow-Based Crowdsourced Mapping in Complex Urban Scenario (qintong 2023)
- Fast map matching, an algorithm integrating hidden Markov model with precomputation
- VectorMapNet: End-to-end Vectorized HD Map Learning
- MapLite 2.0: Online HD Map Inference Using a Prior SD Map
Math in SLAM
- a micro Lie theory for state estimation in robotics (2020)
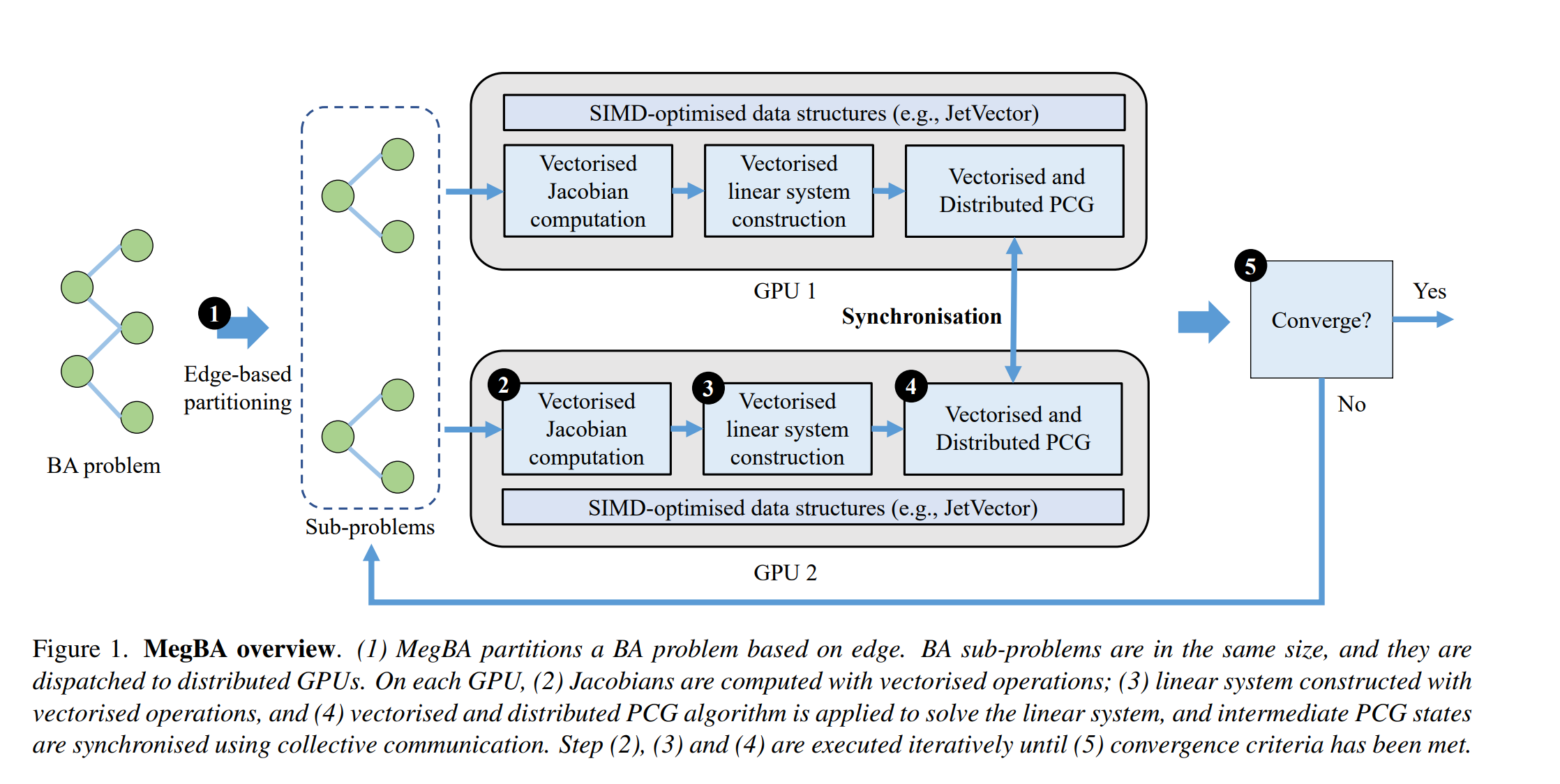
- MegBA: A High-Performance and Distributed Library for Large-Scale Bundle Adjustment https://github.com/MegviiRobot/MegBA
Parking Slot Detection
- Vacant parking slot detection in the around view image based on deep learning