Map introduction in Nuscenes dataset
Published:
Map Introduction In NuScenes Dataset
NuScenesMap
Brief view
class NuScenesMap,地图是一份二维语义矢量地图,这个地图类主要是负责进行地图信息的querying and retrieving. 地图以south western corner作为原点,四幅地图的原点经纬度如下:
boston-seaport: [42.336849169438615, -71.05785369873047]
singapore-onenorth: [1.2882100868743724, 103.78475189208984]
singapore-hollandvillage: [1.2993652317780957, 103.78217697143555]
singapore-queenstown: [1.2782562240223188, 103.76741409301758]
四个地图的维度(width & height)如下, unit(m):
singapore-onenorth: [1585.6, 2025.0]
singapore-hollandvillage: [2808.3, 2922.9]
singapore-queenstown: [3228.6, 3687.1]
boston-seaport: [2979.5, 2118.1]
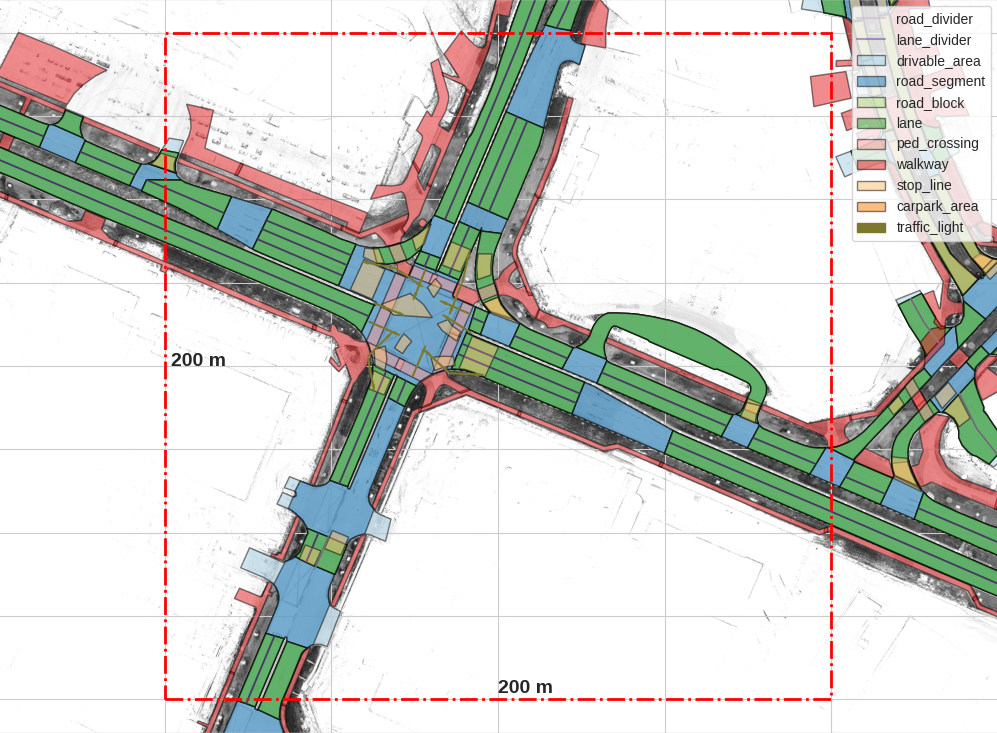
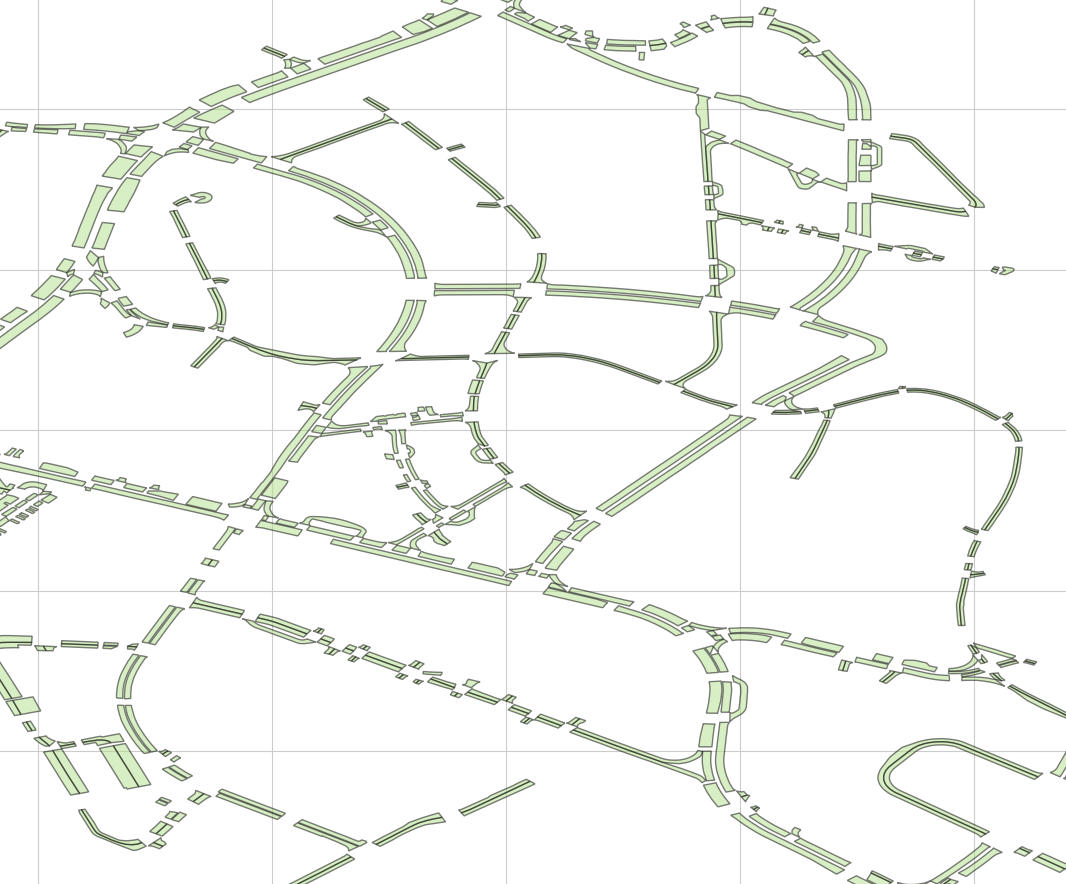
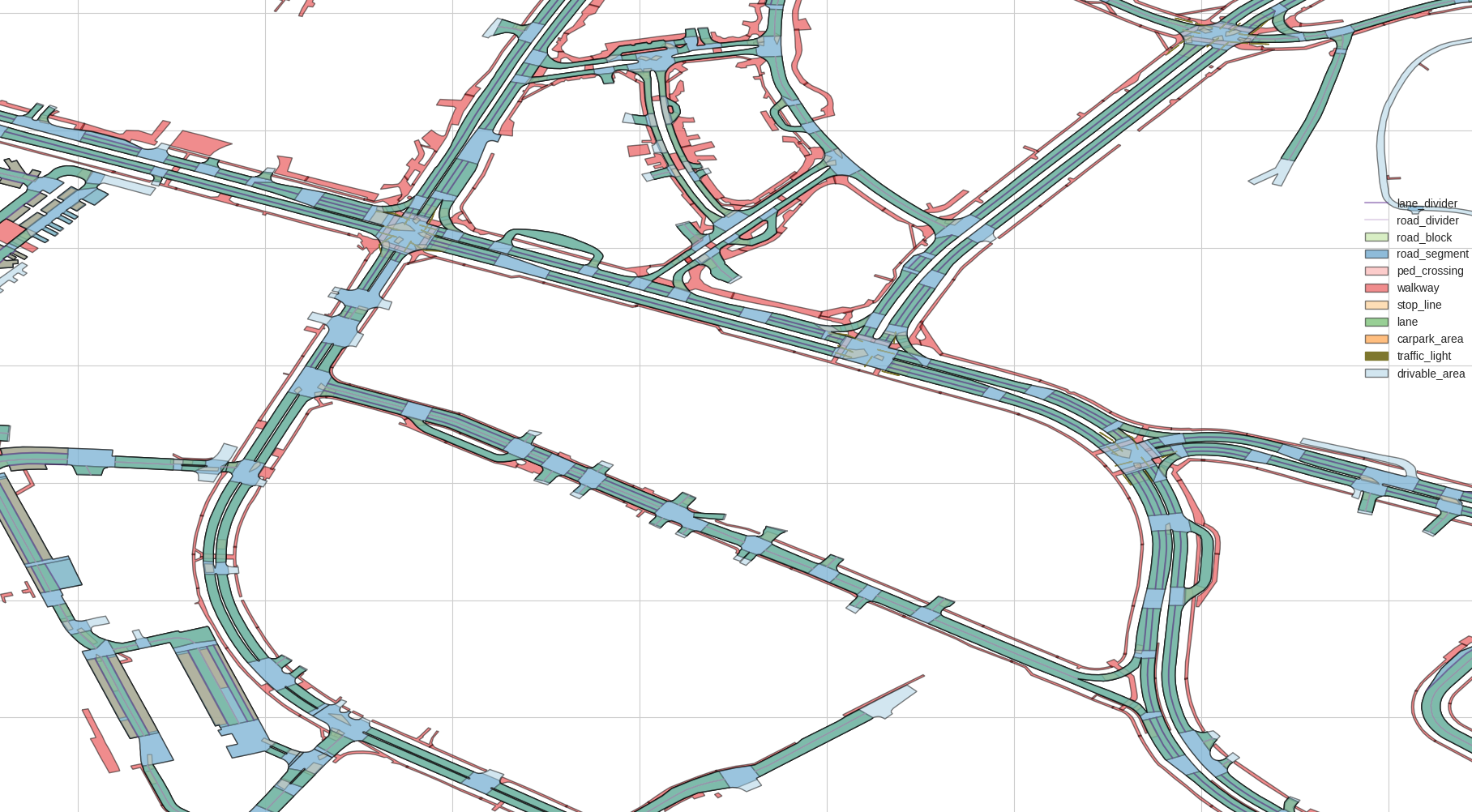
对地图进行了栅格化成像,10pix/m, 因此其图像范围要在上述范围扩大10倍。地图分为两个图层,几何图层和非几何图层,几何图层包括(polygon, line, node), 非几何图层包括(drivable_area, road_segment, road_block, lane, ped_crossing, walkway, stop_line, ‘carpark_area’, ‘road divider’, ‘lane divider’, ‘traffic light’), NuSceneMap Api提供了对不同地图图层的渲染和某一图层下不同record的渲染支持。
map element detail
地图json文件中的元素描述:
- node list
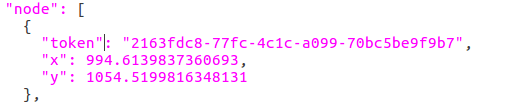
其中token是id标识,x, y是以南西corner为原点的局部坐标
- line list
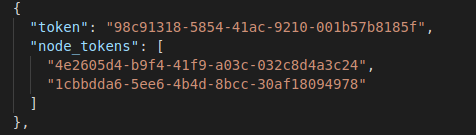
其中token是id标识,node_tokens描述了连接这条线的两个端点
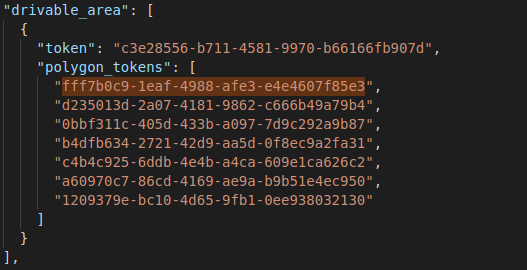
- polygon list
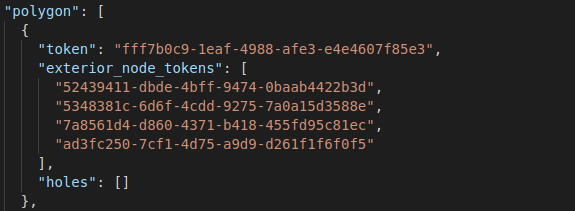
其中token是id标识,exterior_node_tokens描述了polygon的外边界,holes描述了polygon的内边界
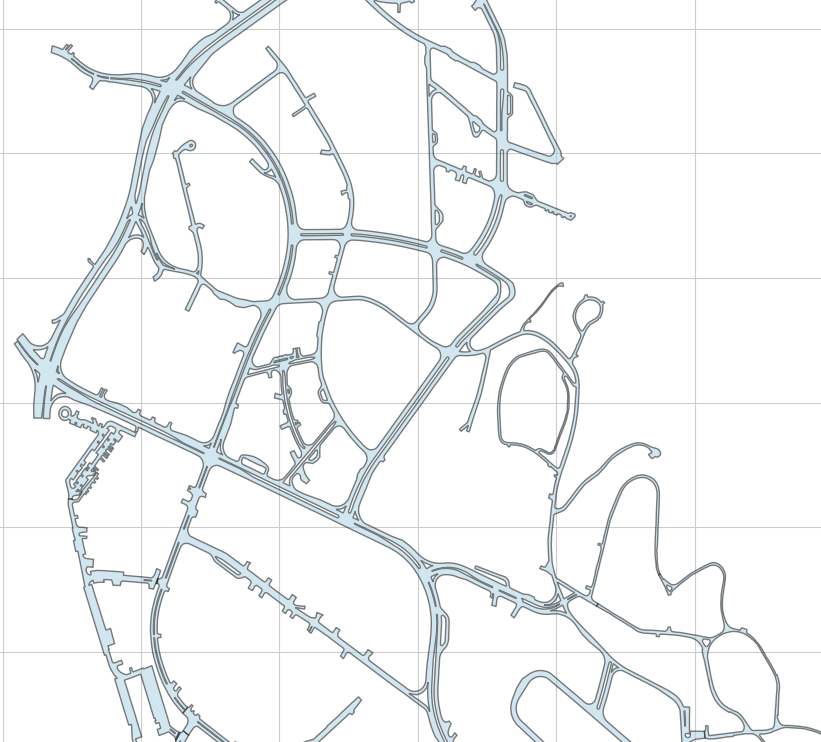
- drivable_area
可视化显示
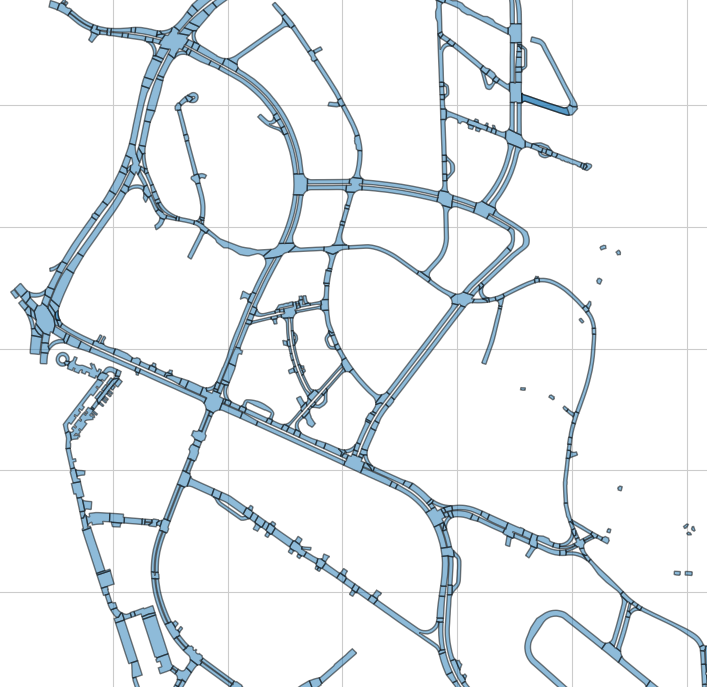
- road segment
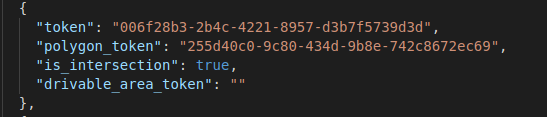
is_intersection表示是否位于路口交汇处
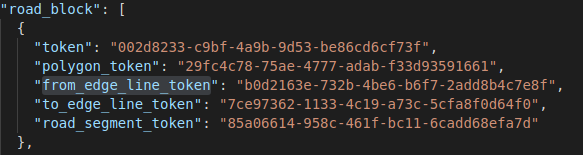
- road block
- lane
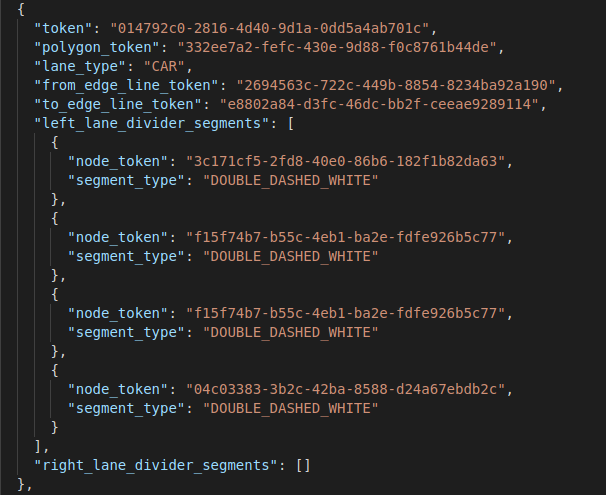
描述了车道的边界,类型等信息

- lane divider
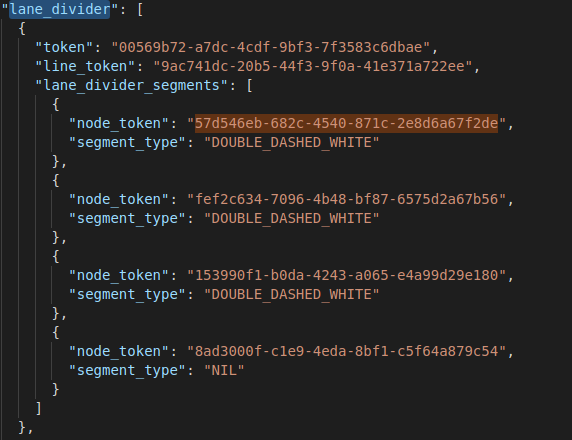
车道线的描述,节点,线段,车道类型

- non_geometry_layer
HD Lidar Basemap
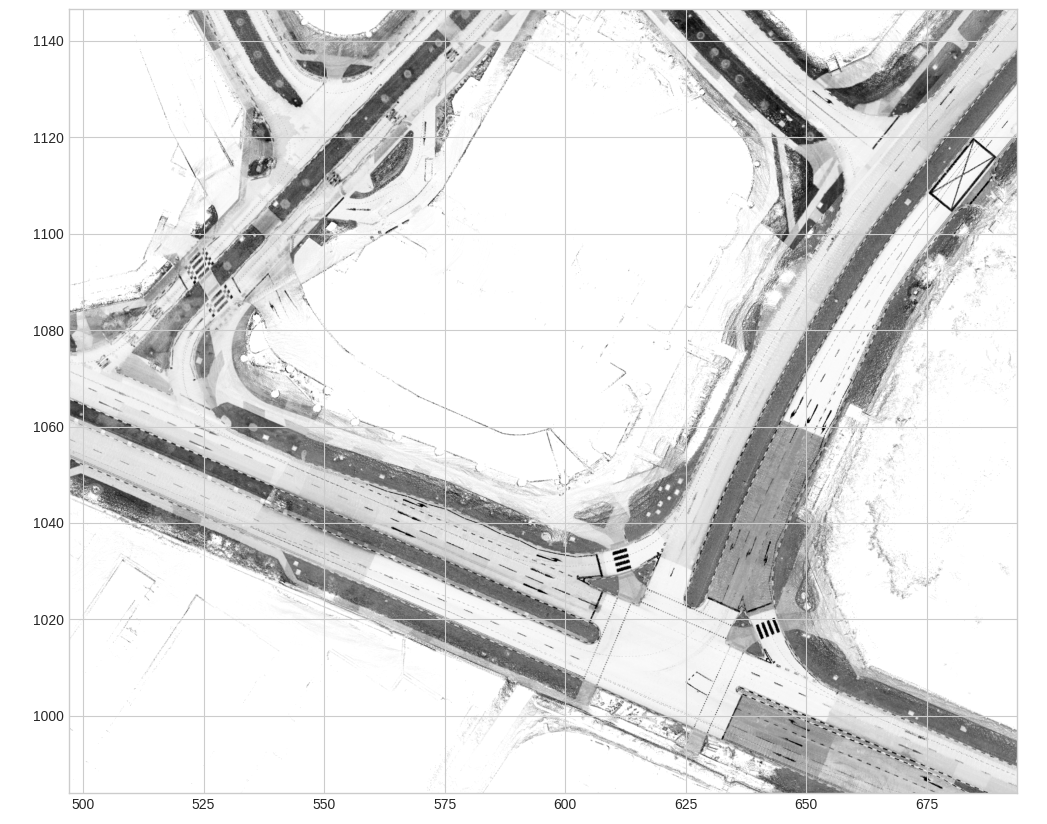
HD lidar base map is used for localization and as general context. 提供了四份相关地图,分别是singapore-onenorth, singepore-hollandvillage, singapore-queenstown, boston-seaport
下图为singapore-onenorth的basemap
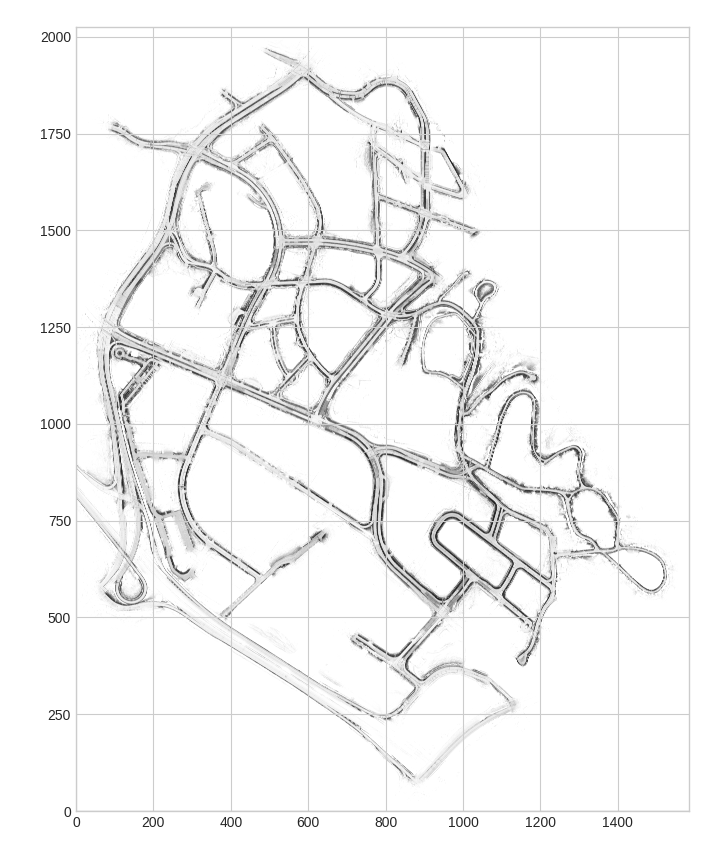
下图为singapore-onenorth的semantic_prior地图
是nuScenes 1.0中提供的semantic prior mask (drivable surface and sidewalks)
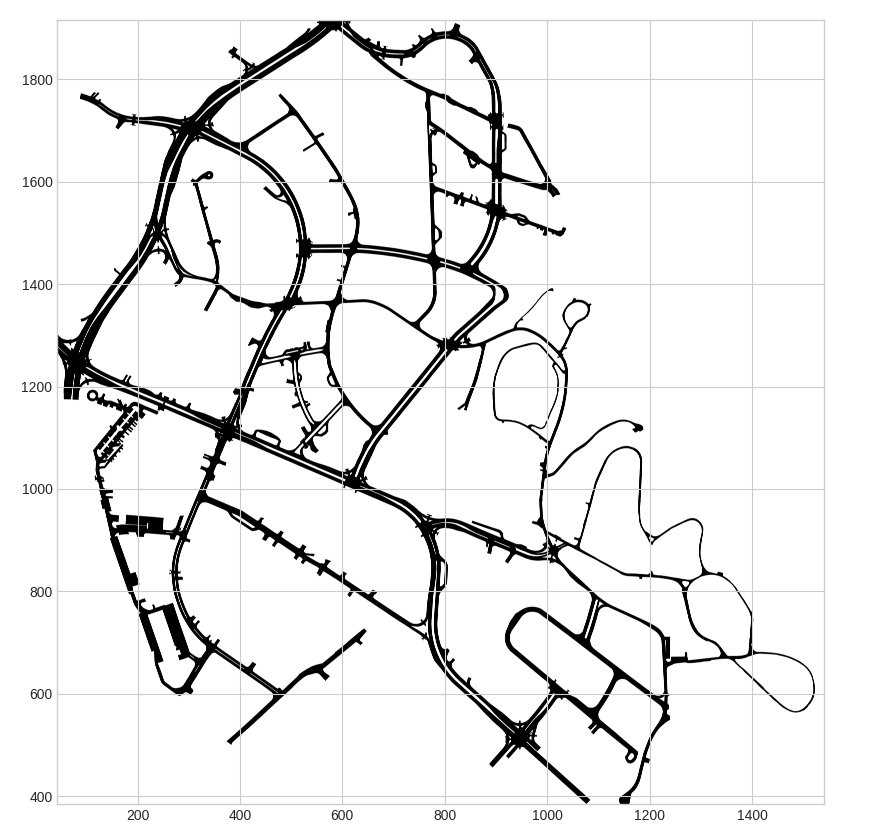
车道中心线和lidar base map的叠加: 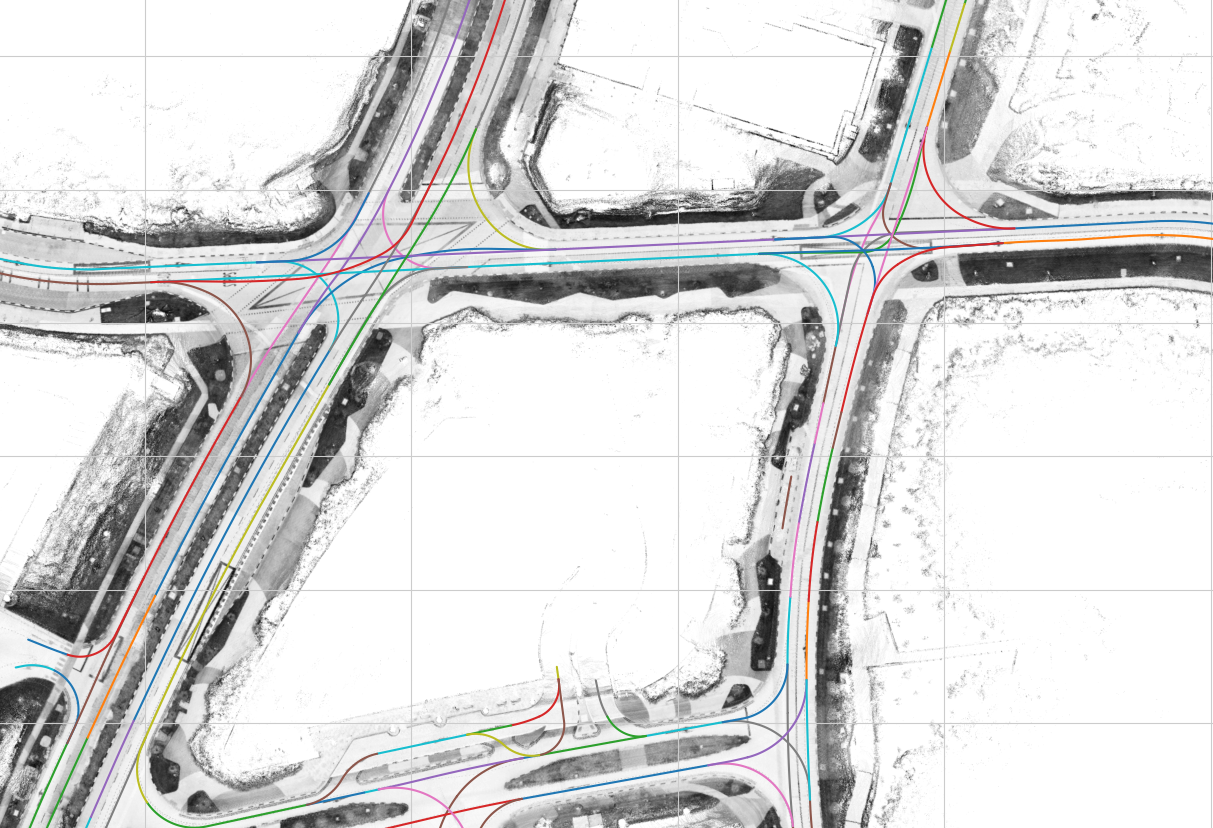
不同的语义图层和lidar base map的叠加