orbslam2-initialize
Published:
orbslam2-initializer
这篇blog主要对orbslam2中的初始化过程进行描述
- 单目初始化
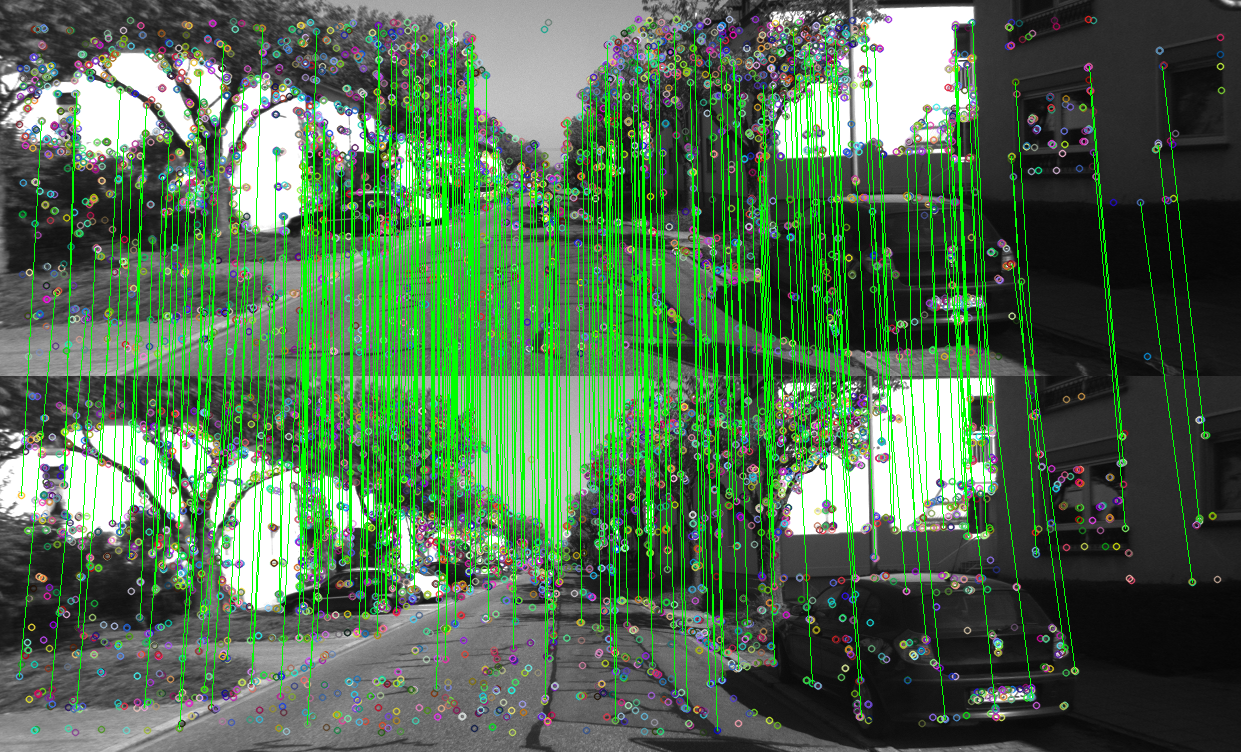
首先当系统未进行初始化的时候,对当前系统进行初始化,当然前提是当前帧的特征点数目满足要求,以当前帧来构建initializer,当下一帧的特征点数目也满足要求的时候,利用matcher进行特征点匹配,如果匹配数量满足要求,则尝试进行初始化,如下图,对kitti数据中的前后连续两帧进行初始化,两帧的特征点匹配结果如图所示:
通过调用:
mpInitializer->Initialize(
mCurrentFrame, //当前帧
mvIniMatches, //当前帧和参考帧的特征点的匹配关系
Rcw, tcw, //初始化得到的相机的位姿
mvIniP3D, //进行三角化得到的空间点集合
vbTriangulated)
得到两帧之间的旋转平移,初始的三角化的点和三角化是否成功的标志,然后根据初始化的结果创建单目初始化地图,流程如下:
- 根据当前帧和参考帧构建关键帧,并将关键帧插入地图
- 根据初始匹配关系生成地图点,建立地图点,并插入到地图中;关键帧,地图三方的观测连接关系
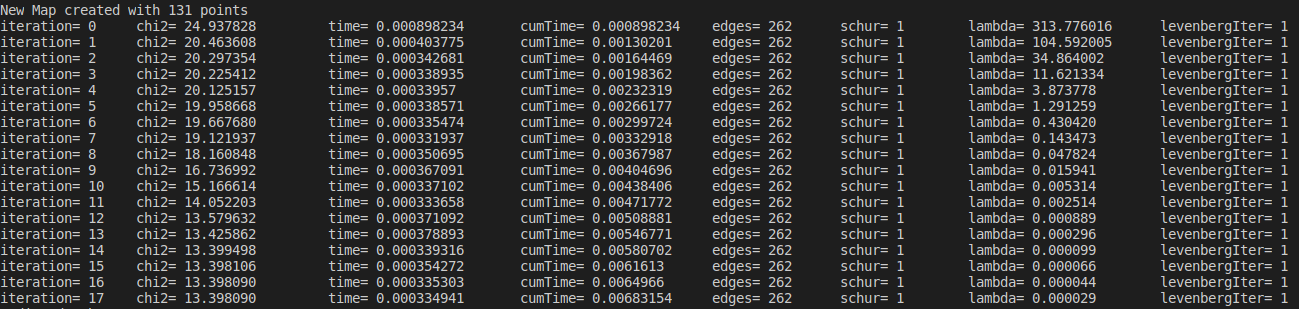
- 对初始化的两帧和地图点进行全局优化 如图是优化过程中残差的变化:
- 根据三角化的地图点计算场景的中值深度,利用中值深度对变换和地图点进行归一化(optional)
- 构建局部地图,局部关键帧,局部地图点
初始化完成后得到的结果如下图所示: 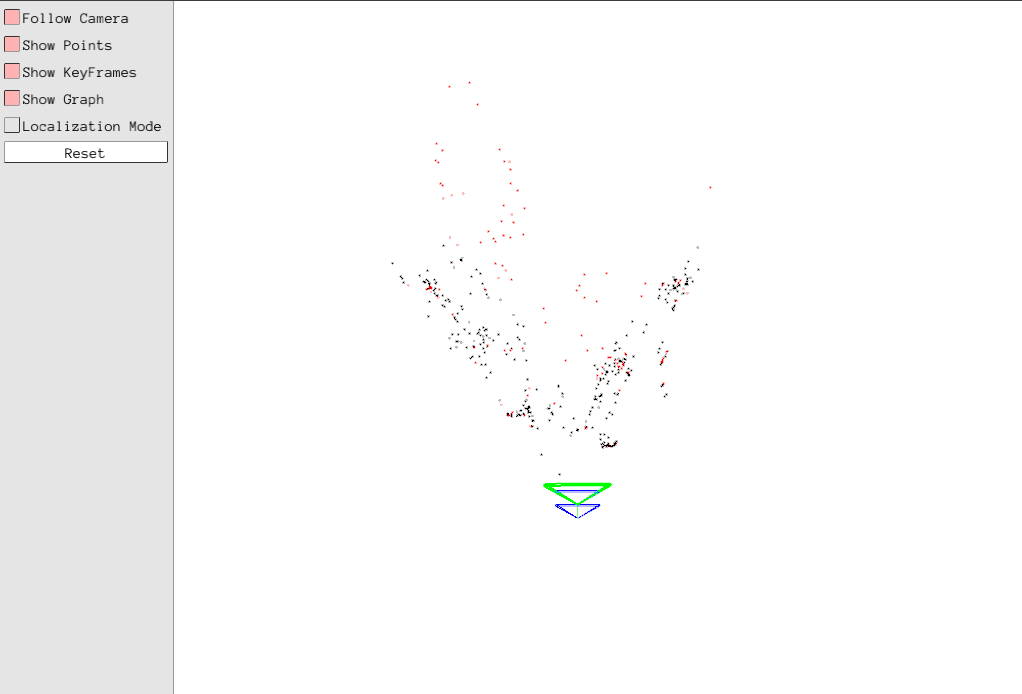 其中蓝色框是初始化成功的两帧关键帧,绿色框为当前相机,红色点为初始化过程中的参考地图点,黑色点是所有的地图点,其中比参考地图点多出来的部分是local mapping线程通过特征点匹配新生成的一些地图点,因为初始化时候的特征匹配并不充分,跟踪线程给局部建图线程每发送一个关键帧,都会进入local mapping的loop,通过对两个关键帧之间进行bow match来新增一些地图点
其中蓝色框是初始化成功的两帧关键帧,绿色框为当前相机,红色点为初始化过程中的参考地图点,黑色点是所有的地图点,其中比参考地图点多出来的部分是local mapping线程通过特征点匹配新生成的一些地图点,因为初始化时候的特征匹配并不充分,跟踪线程给局部建图线程每发送一个关键帧,都会进入local mapping的loop,通过对两个关键帧之间进行bow match来新增一些地图点
这样就完成了单目初始化,下面对初始化函数Initialize进行分析,基本步骤如下:
- 根据参考帧和当前帧的特征点匹配关系,建立用于ransac的8点索引集合
- 双线程并行计算homography和fundamental矩阵
- 根据评分(双向重投影误差)选择其中一个来恢复帧间变换和三角化的空间点
其中单应矩阵和基础矩阵的计算均是用8个归一化的点,采用svd分解进行计算。根据H, F进行变换矩阵恢复的时候会产生多组解,选择能够产生最多三角化点的一组解作为最终的解,同时有相应的ratio test(最佳解的三维点个数要远多于次佳解),视差角要满足阈值,三角化点的个数要满足阈值等条件
- 双目和rgbd初始化
通过反投影直接进行初始化,将地图点插入地图,将初始帧作为关键帧也插入地图。将初始帧传送给local mapping,设置局部关键帧等。如图所示: 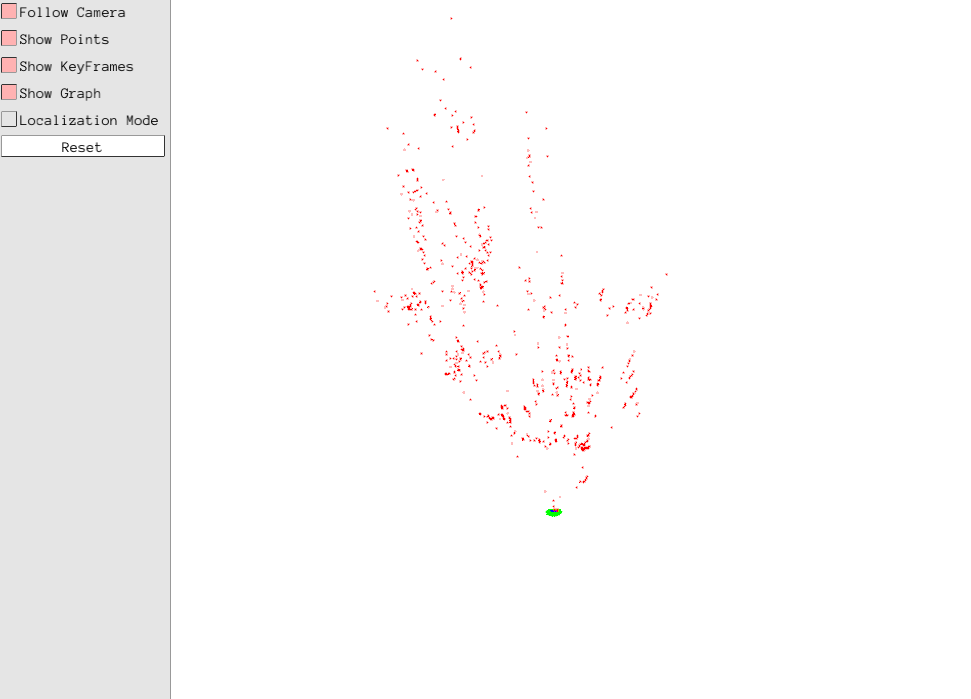
这个时候参考地图点就是所有的地图点,通过第一帧就直接完成初始化,local mapping中因为只有一帧,所以并没有产生新的地图点。双目初始化简单,相比单目能够对尺度进行确定,是一个较大的优势