lidar localization & mapping
Published:
lidar slam study note
INTRODUCTION
最近阅读了知乎上任乾大佬的“从零开始做自动驾驶定位”专栏文章,学习到很多东西,这里对其内容记录一些学习心得。总体上说,任佬的系列文章从0到1的讲述了利用激光传感器进行建图和定位的全过程,代码上具有扩展性并且分模块进行开发,通过ros系统进行不同节点的消息通信,每个节点都有对应的模块的工作流,在工作流中调用相应模块的核心算法。模块包括了数据预处理节点,前端激光里程计节点,后端图优化节点,回环检测节点,可视化地图发布节点,相当于是一种多进程的并行处理,下面对每部分进行详细介绍。
数据预处理模块
int main(int argc, char *argv[]) {
google::InitGoogleLogging(argv[0]);
FLAGS_log_dir = WORK_SPACE_PATH + "/Log";
FLAGS_alsologtostderr = 1;
ros::init(argc, argv, "data_pretreat_node");
ros::NodeHandle nh;
std::string cloud_topic;
nh.param<std::string>("cloud_topic", cloud_topic, "/synced_cloud");
std::shared_ptr<DataPretreatFlow> data_pretreat_flow_ptr = std::make_shared<DataPretreatFlow>(nh, cloud_topic);
ros::Rate rate(100);
while (ros::ok()) {
ros::spinOnce();
data_pretreat_flow_ptr->Run();
rate.sleep();
}
return 0;
}
可以看到其主体就是不断的订阅rosbag发布的消息,然后交给DataPretreatFlow进行处理,数据预处理模块所做的工作主要是订阅如下消息:
- /kitti/velo/pointcloud 点云消息
- /kitti/oxts/imu imu消息
- /kitti/oxts/gps/vel 速度消息
- /kitti/oxts/gps/fix gnss消息
发布如下消息:
- /synced_cloud 运动畸变补偿后的点云消息
- /synced_gnss 时间同步后的gnss消息(transformation)
数据预处理流的基本流程如下
bool DataPretreatFlow::Run() {
if (!ReadData())
return false;
if (!InitCalibration())
return false;
if (!InitGNSS())
return false;
while(HasData()) {
if (!ValidData())
continue;
TransformData();
PublishData();
}
return true;
}
- 订阅器解析消息到数据队列,将除点云外的其他数据(imu, velocity, gnss)做时间同步
- 获取lidar到imu之间的外参变换矩阵,以便将pose, 速度转到lidar坐标系下
- 利用GeographicLib将gnss坐标系转换为以第一个gnss坐标为原点的局部笛卡尔坐标系
- when当前要处理的同步后的数据队列(cloud_data_buff, imu_data_buff, velocity_data_buff, gnss_data_buff)中含有数据的时候,对数据进行变换.将gnss pose,velocity从imu坐标系变换为lidar坐标系, 根据匀速模型进行点云运动补偿
- 发布去除运动畸变的点云数据和gnss pose(lidar 相对于世界的pose)
其中运动补偿功能根据匀速模型对点云进行畸变补偿,即将一帧点云的坐标点转换到同一时刻,如将0-100ms的一帧扫描点云转换到50ms的地方。补偿的核心代码如下:
for (size_t point_index = 1; point_index < origin_cloud_ptr->points.size(); ++point_index) {
float orientation = atan2(origin_cloud_ptr->points[point_index].y, origin_cloud_ptr->points[point_index].x);
if (orientation < 0.0)
orientation += 2.0 * M_PI;
if (orientation < delete_space || 2.0 * M_PI - orientation < delete_space)
continue;
float real_time = fabs(orientation) / orientation_space * scan_period_ - scan_period_ / 2.0;
Eigen::Vector3f origin_point(origin_cloud_ptr->points[point_index].x,
origin_cloud_ptr->points[point_index].y,
origin_cloud_ptr->points[point_index].z);
Eigen::Matrix3f current_matrix = UpdateMatrix(real_time);
Eigen::Vector3f rotated_point = current_matrix * origin_point;
Eigen::Vector3f adjusted_point = rotated_point + velocity_ * real_time;
CloudData::POINT point;
point.x = adjusted_point(0);
point.y = adjusted_point(1);
point.z = adjusted_point(2);
output_cloud_ptr->points.push_back(point);
}
对于每个扫描点,计算其平面坐标系x, y计算其扫描角,根据其扫描角度计算以中间时刻为原点的补偿时间,根据时间,速度,角速度计算补偿的旋转矩阵和平移向量,最后根据旋转平移对坐标系进行变换得到补偿后的点云,利用补偿后的点云进行后续的pose的计算
前端激光里程计模块
顾名思义,其作用就是输入序列点云数据,输出激光里程计pose,其订阅”/synced_cloud”消息,发布/laser_odom消息,前端里程计的思路也比较简单,即将当前点云和局部地图进行匹配求解pose,匹配方法可以是icp, ndt或各种变种方法,当然也可以用其他现成的激光里程计方法,如LOAM及其各种变种方法,局部地图是前端维护的关键帧窗口,是匹配时的target pointcloud,核心代码如下:
bool FrontEnd::Update(const CloudData& cloud_data, Eigen::Matrix4f& cloud_pose) {
current_frame_.cloud_data.time = cloud_data.time;
std::vector<int> indices;
pcl::removeNaNFromPointCloud(*cloud_data.cloud_ptr, *current_frame_.cloud_data.cloud_ptr, indices);
CloudData::CLOUD_PTR filtered_cloud_ptr(new CloudData::CLOUD());
frame_filter_ptr_->Filter(current_frame_.cloud_data.cloud_ptr, filtered_cloud_ptr);
static Eigen::Matrix4f step_pose = Eigen::Matrix4f::Identity();
static Eigen::Matrix4f last_pose = init_pose_;
static Eigen::Matrix4f predict_pose = init_pose_;
static Eigen::Matrix4f last_key_frame_pose = init_pose_;
// 局部地图容器中没有关键帧,代表是第一帧数据
// 此时把当前帧数据作为第一个关键帧,并更新局部地图容器和全局地图容器
if (local_map_frames_.size() == 0) {
current_frame_.pose = init_pose_;
UpdateWithNewFrame(current_frame_);
cloud_pose = current_frame_.pose;
return true;
}
// 不是第一帧,就正常匹配
CloudData::CLOUD_PTR result_cloud_ptr(new CloudData::CLOUD());
registration_ptr_->ScanMatch(filtered_cloud_ptr, predict_pose, result_cloud_ptr, current_frame_.pose);
cloud_pose = current_frame_.pose;
// 更新相邻两帧的相对运动
step_pose = last_pose.inverse() * current_frame_.pose;
predict_pose = current_frame_.pose * step_pose;
last_pose = current_frame_.pose;
// 匹配之后根据距离判断是否需要生成新的关键帧,如果需要,则做相应更新
if (fabs(last_key_frame_pose(0,3) - current_frame_.pose(0,3)) +
fabs(last_key_frame_pose(1,3) - current_frame_.pose(1,3)) +
fabs(last_key_frame_pose(2,3) - current_frame_.pose(2,3)) > key_frame_distance_) {
UpdateWithNewFrame(current_frame_);
last_key_frame_pose = current_frame_.pose;
}
return true;
}
首先去除当前点云中的异常值并进行过滤,如果是第一帧,则把当前数据置为关键帧(UpdateWithNewFrame),对于其他帧则进行scanMatch(如ndt::align)计算当前帧的pose,然后更新运动模型以获得下一帧的预测值,同时根据当前帧的pose以及上一关键帧的pose进行关键帧判断。 关键帧的生成和局部地图的构建如下:
bool FrontEnd::UpdateWithNewFrame(const Frame& new_key_frame) {
Frame key_frame = new_key_frame;
// 这一步的目的是为了把关键帧的点云保存下来
// 由于用的是共享指针,所以直接复制只是复制了一个指针而已
// 此时无论你放多少个关键帧在容器里,这些关键帧点云指针都是指向的同一个点云
key_frame.cloud_data.cloud_ptr.reset(new CloudData::CLOUD(*new_key_frame.cloud_data.cloud_ptr));
CloudData::CLOUD_PTR transformed_cloud_ptr(new CloudData::CLOUD());
// 更新局部地图
local_map_frames_.push_back(key_frame);
while (local_map_frames_.size() > static_cast<size_t>(local_frame_num_)) {
local_map_frames_.pop_front();
}
local_map_ptr_.reset(new CloudData::CLOUD());
for (size_t i = 0; i < local_map_frames_.size(); ++i) {
pcl::transformPointCloud(*local_map_frames_.at(i).cloud_data.cloud_ptr,
*transformed_cloud_ptr,
local_map_frames_.at(i).pose);
*local_map_ptr_ += *transformed_cloud_ptr;
}
// 更新ndt匹配的目标点云
// 关键帧数量还比较少的时候不滤波,因为点云本来就不多,太稀疏影响匹配效果
if (local_map_frames_.size() < 10) {
registration_ptr_->SetInputTarget(local_map_ptr_);
} else {
CloudData::CLOUD_PTR filtered_local_map_ptr(new CloudData::CLOUD());
local_map_filter_ptr_->Filter(local_map_ptr_, filtered_local_map_ptr);
registration_ptr_->SetInputTarget(filtered_local_map_ptr);
}
return true;
}
其主要工作就是维护局部地图,将局部地图作为前端匹配的目标点云, 如下图为ndt点云匹配里程计的一个结果: 
后端建图
前端激光里程计提供了帧间的相对约束,这些约束会被发送给后端,放到优化的因子图里,任佬的后端主要包括三种因子,一种帧间的里程计约束,一种gnss的先验约束,一种检测到的回环约束,总体而言就是一个典型的pose-graph优化问题。 其接收的输入消息为:
- /sync_cloud 点云消息(后端会将关键帧点云存到硬盘里)
- /sync_gnss 同步的gnss消息
- /laser_odom 激光里程计消息(因子图中要添加的帧间约束)
- /loop_pose 回环的消息(当前帧,回环帧,相对pose)
其计算输出的发布消息为:
- /transformed_odom gnss坐标系下的pose
- /key_frame 最新的关键帧消息(pose, index, time)
- /key_gnss 最新的gnss消息
- /optimized_key_frames 后端优化后的关键帧序列
后端流程依然是读取相应的数据消息,将当前帧的点云数据,laser_odom数据以及gnss_pose数据交给后端进行处理,最后发布处理后的结果,其核心算法代码如下:
bool BackEnd::Update(const CloudData& cloud_data, const PoseData& laser_odom, const PoseData& gnss_pose) {
if (MaybeNewKeyFrame(cloud_data, laser_odom, gnss_pose)) {
AddNodeAndEdge(gnss_pose);
if (MaybeOptimized()) {
SaveOptimizedPose(); // save backend optimized pose
}
}
return true;
}
首先只将关键帧加入optimize graph,根据距离进行关键帧判别,如果是关键帧,则:
if (has_new_key_frame_) {
// 把关键帧点云存储到硬盘里
std::string file_path = key_frames_path_ + "/key_frame_" + std::to_string(key_frames_deque_.size()) + ".pcd";
pcl::io::savePCDFileBinary(file_path, *cloud_data.cloud_ptr);
KeyFrame key_frame;
key_frame.time = laser_odom.time;
key_frame.index = (unsigned int)key_frames_deque_.size();
key_frame.pose = laser_odom.pose;
key_frames_deque_.push_back(key_frame);
current_key_frame_ = key_frame;
current_key_gnss_.time = gnss_odom.time;
current_key_gnss_.index = key_frame.index;
current_key_gnss_.pose = gnss_odom.pose;
}
即将关键帧点云存到disk上,pose等信息存到关键帧队列中,并同时设置current_key_frame_和current_key_pose_,用于后续factor graph的node和edge的插入,分别添加关键帧节点,激光里程计对应的边,gnss位置的先验边以及loop closure edge.当满足优化条件的时候(一定的关键帧个数,一定的loop个数,一个gnss测量个数),进行优化:
bool G2oGraphOptimizer::Optimize() {
static int optimize_cnt = 0;
if(graph_ptr_->edges().size() < 1) {
return false;
}
TicToc optimize_time;
graph_ptr_->initializeOptimization();
graph_ptr_->computeInitialGuess();
graph_ptr_->computeActiveErrors();
graph_ptr_->setVerbose(false);
double chi2 = graph_ptr_->chi2();
int iterations = graph_ptr_->optimize(max_iterations_num_);
LOG(INFO) << std::endl << "------ 完成第 " << ++optimize_cnt << " 次后端优化 -------" << std::endl
<< "顶点数:" << graph_ptr_->vertices().size() << ", 边数: " << graph_ptr_->edges().size() << std::endl
<< "迭代次数: " << iterations << "/" << max_iterations_num_ << std::endl
<< "用时:" << optimize_time.toc() << std::endl
<< "优化前后误差变化:" << chi2 << "--->" << graph_ptr_->chi2()
<< std::endl << std::endl;
return true;
}
当优化完成的时候,将优化后的pose赋值给关键帧,得到优化之后的关键帧(当前因子图中的所有帧)并发布给其他需要订阅的模块
回环检测模块
loop closure模块包括回环检测和匹配两步,将通过验证的回环关系发送给后端因子图中,以在满足条件的时候进行优化,且订阅的消息包括后端发布的关键帧消息和关键gnss消息:
- /key_frame 关键帧消息
- /key_gnss 关键帧对应的gnss消息 其计算的输出为:
- /loop_pose (index0, index1, relative_pose)
回环检测负责计算距离当前关键帧最近的关键帧,但为了避免小回环,需要与当前帧相距一定的帧数,同时考虑到计算量,当检测到回环的时候,需要跳过一些帧再做回环检测;检测到关键帧之后需要进行配准,实现如下:
bool LoopClosing::CloudRegistration(int key_frame_index) {
// 生成地图
CloudData::CLOUD_PTR map_cloud_ptr(new CloudData::CLOUD());
Eigen::Matrix4f map_pose = Eigen::Matrix4f::Identity();
JointMap(key_frame_index, map_cloud_ptr, map_pose);
// 生成当前scan
CloudData::CLOUD_PTR scan_cloud_ptr(new CloudData::CLOUD());
Eigen::Matrix4f scan_pose = Eigen::Matrix4f::Identity();
JointScan(scan_cloud_ptr, scan_pose);
// 匹配
Eigen::Matrix4f result_pose = Eigen::Matrix4f::Identity();
Registration(map_cloud_ptr, scan_cloud_ptr, scan_pose, result_pose);
// 计算相对位姿
current_loop_pose_.pose = map_pose.inverse() * result_pose;
// 判断是否有效
if (registration_ptr_->GetFitnessScore() > fitness_score_limit_)
return false;
static int loop_close_cnt = 0;
loop_close_cnt ++;
std::cout << "检测到闭环 "<< loop_close_cnt
<< ": 帧" << current_loop_pose_.index0
<< "------>" << "帧" << current_loop_pose_.index1 << std::endl
<< "fitness score: " << registration_ptr_->GetFitnessScore()
<< std::endl << std::endl;
return true;
}
首先根据检测到的关键帧索引生成匹配的局部地图(keyframe_index-extend_frame_num, keyframe_index+extend_frame_num),生成的局部点云地图是gnss坐标系下拼接的一份点云,然后利用当前扫描生成当前坐标系下的点云,通过点云匹配计算出相对位姿,将最终形成的loop(keyframe_index, current_index, relative_pose)发送给后端加入到因子图中即可。加入回环可以有效的降低重影误差,因为其目标函数就是最小化重影误差,有效的提高建图的一致性。如下图是回环校正的一个过程:
 可以看到经过校正后回环误差得到了有效的矫正
可以看到经过校正后回环误差得到了有效的矫正
可视地图发送模块
经过前后端的处理,会生成当前scan, local map和global map,将这些信息处理发布给rviz,通过rviz进行显示,可视化方便结果的显示与调试 其订阅的输入为:
- /synced_cloud 当前帧扫描点云
- /key_frame 后端处理的关键帧
- /transformed_odom gnss坐标系下的里程计
- /optimized_key_frames 后端优化后的关键帧 其发布的输出为:
- /optimized_odom 经过后端优化后的里程计
- /current_scan
- /local_map
- /global_map
这里的pose修正代码或许有点问题,需要进一步分析(todo)
程序运行过程中可以随时调用save map这样的ros service来进行地图的保存,其调用的代码为:
bool Viewer::SaveMap() {
if (optimized_key_frames_.size() == 0)
return false;
// 生成地图
CloudData::CLOUD_PTR global_map_ptr(new CloudData::CLOUD());
JointCloudMap(optimized_key_frames_, global_map_ptr);
// 保存原地图
std::string map_file_path = map_path_ + "/map.pcd";
pcl::io::savePCDFileBinary(map_file_path, *global_map_ptr);
// 保存滤波后地图
std::shared_ptr<VoxelFilter> map_filter_ptr = std::make_shared<VoxelFilter>(0.5, 0.5, 0.5);
map_filter_ptr->Filter(global_map_ptr, global_map_ptr);
std::string filtered_map_file_path = map_path_ + "/filtered_map.pcd";
pcl::io::savePCDFileBinary(filtered_map_file_path, *global_map_ptr);
return true;
}
利用修正后的pose和储存在硬盘上的点云生成全局地图进行保存,同时可以保存滤波后的地图进行基于地图的定位
Matching模块
Matching模块完成的工作就是基于前述建立的点云地图进行lidar localization,实际上就是一个current_scan和local map进行配准的过程,local map是通过BoxCrop从全局地图中截取得到的。Matching模块完成的是定位工作,不需要后端优化建图,其全局地图是通过load的方式直接载入 其订阅的输入为:
- /synced_cloud 当前扫描帧点云
- /synced_gnss 同步的gnss消息
其输出为:
- /global_map 载入的全局地图
- /local_map 根据当前帧位置截取的局部地图
- /current_scan
- /laser_localization 激光相对于地图的定位信息(lidar relative to map)
局部地图截取的代码:
bool Matching::ResetLocalMap(float x, float y, float z) {
std::vector<float> origin = {x, y, z};
box_filter_ptr_->SetOrigin(origin);
box_filter_ptr_->Filter(global_map_ptr_, local_map_ptr_);
registration_ptr_->SetInputTarget(local_map_ptr_);
has_new_local_map_ = true;
std::vector<float> edge = box_filter_ptr_->GetEdge();
LOG(INFO) << "new local map:" << edge.at(0) << ","
<< edge.at(1) << ","
<< edge.at(2) << ","
<< edge.at(3) << ","
<< edge.at(4) << ","
<< edge.at(5) << std::endl << std::endl;
return true;
}
用一个立方体截取local map,作为匹配的目标点云。
其根据当前帧点云定位更新的方法如下:
bool Matching::Update(const CloudData& cloud_data, Eigen::Matrix4f& cloud_pose) {
//去掉异常值 + cloud filter
std::vector<int> indices;
pcl::removeNaNFromPointCloud(*cloud_data.cloud_ptr, *cloud_data.cloud_ptr, indices);
CloudData::CLOUD_PTR filtered_cloud_ptr(new CloudData::CLOUD());
frame_filter_ptr_->Filter(cloud_data.cloud_ptr, filtered_cloud_ptr);
static Eigen::Matrix4f step_pose = Eigen::Matrix4f::Identity();
static Eigen::Matrix4f last_pose = init_pose_;
static Eigen::Matrix4f predict_pose = init_pose_;
if (!has_inited_) {
predict_pose = current_gnss_pose_;
}
// 与地图匹配
CloudData::CLOUD_PTR result_cloud_ptr(new CloudData::CLOUD());
registration_ptr_->ScanMatch(filtered_cloud_ptr, predict_pose, result_cloud_ptr, cloud_pose);
//根据pose将当前帧点云转换到全局坐标系下进行发布
pcl::transformPointCloud(*cloud_data.cloud_ptr, *current_scan_ptr_, cloud_pose);
// 更新相邻两帧的相对运动
step_pose = last_pose.inverse() * cloud_pose;
predict_pose = cloud_pose * step_pose;
last_pose = cloud_pose;
// 匹配之后判断是否需要更新局部地图
std::vector<float> edge = box_filter_ptr_->GetEdge();
for (int i = 0; i < 3; i++) {
if (fabs(cloud_pose(i, 3) - edge.at(2 * i)) > 50.0 &&
fabs(cloud_pose(i, 3) - edge.at(2 * i + 1)) > 50.0)
continue;
ResetLocalMap(cloud_pose(0,3), cloud_pose(1,3), cloud_pose(2,3));
break;
}
return true;
}
比较多的使用了static的特性
Lidar map based lidar localization的示意图如下: 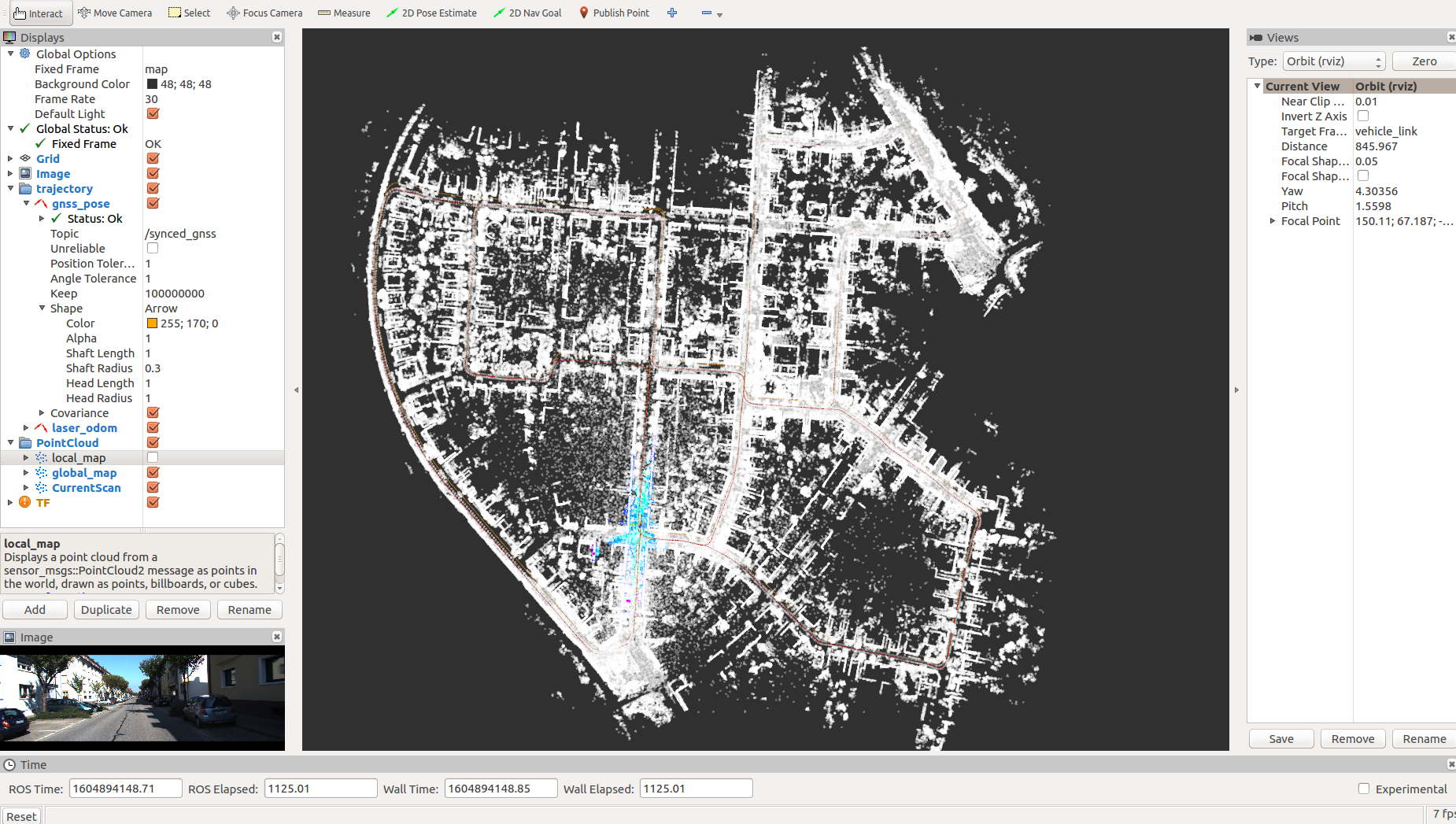
最后,感谢任佬(https://www.zhihu.com/people/ren-gan-16)的工作!!!