stereo match
Published:
立体匹配
Stereo Matching
双目匹配
在双目匹配的范畴里,本次内容主要局限在以下两个小的部分:
- SGM(经典) 原理解析
- comparation with monodepth
SGM
半全局匹配算法(SGM)是实时立体视觉里最流行的一个算法,已经大规模的在很多产品里得到了应用。其最早由H. Hirschmuller 在2005年发表于CVPR的文章中被提出
‘Accurate and efficient stereo processing by semi-global matching and mutual information’
立体匹配算法在深度学习算法强势来袭之前,可以分为3大流派,包括局部派(SAD, SSD, NCC, Census-Transform, Mutual Information …),全局派 (Graph Cut, Belief Propagation, Dynamic Programming …), 以及半全局派 (SGM). SGM是半全局领域的代表之作,相对于局部派的简单粗暴,SGM更加优雅复杂,同时也没有全局派那么time-consuming (https://blog.csdn.net/rs_lys/)
SGM算法步骤较多,整体上比较复杂。希望经过这次分享,能够对其原理有更好的理解。
- opencv 接口
cv::Ptr<cv::StereoSGBM> sgbm = cv::StereoSGBM::create(minDisparity, numDisparity, SADWindowSize, p1, p2, diso12MaxDiff,preFilterCap, uniqueRatio, speckleWindowSize, speckleRange, fullDp); cv::Mat disparity_sgbm; sgbm->compute(frame->left, frame->right, disparity_sgbm); disparity_sgbm.convertTo(frame->disparity, CV_32F, 1.0 / 16.0f);参数含义解释:
- minDisparity: 最小视差
- numDisparity: 视差个数(64 / 96 / 128 / 256 …)
- SADWindowSize: 灰度相关时的窗口大小 (3 / 5 / 7 …)
- p1, p2, 平滑性惩罚系数, 下文会介绍详细含义
- diso12MaxDiff 左右视差检查中允许的最大差异
- preFilterCap 预滤波图像像素的截断值 (下文中未用到),主要是图像预处理的操作,用来排除噪声干扰,提高边界的可区分性
- uniqueRatio 唯一性比值 (ratio test)
- speckleWindowSize 平滑视差区域的最大尺寸 (过滤一些斑点噪声)
- speckleRange 连接组件(斑点)内的最大视差变化
- reference: (docs.opencv.org)
** 样例双目输入与输出:
left

right

gray-scale show

color map show
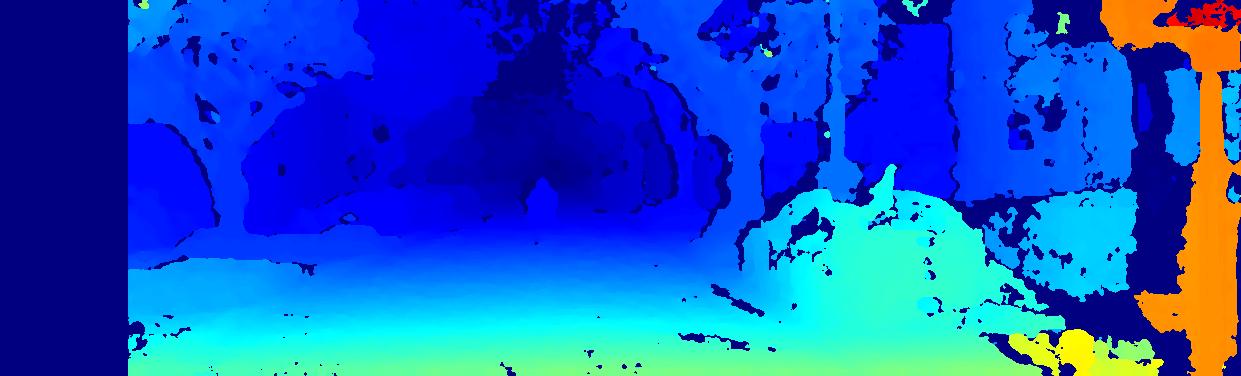
可以看到有比较多的空洞和视差不连续的地方,正常的流程中还包括一步视差图滤波后处理(weighted least square filtering)
opencv接口
wls_filter = createDisparityWLSFilter(left_matcher);
wls_filter->filter(left_disp,left,filtered_disp,right_disp);
应用滤波之后:
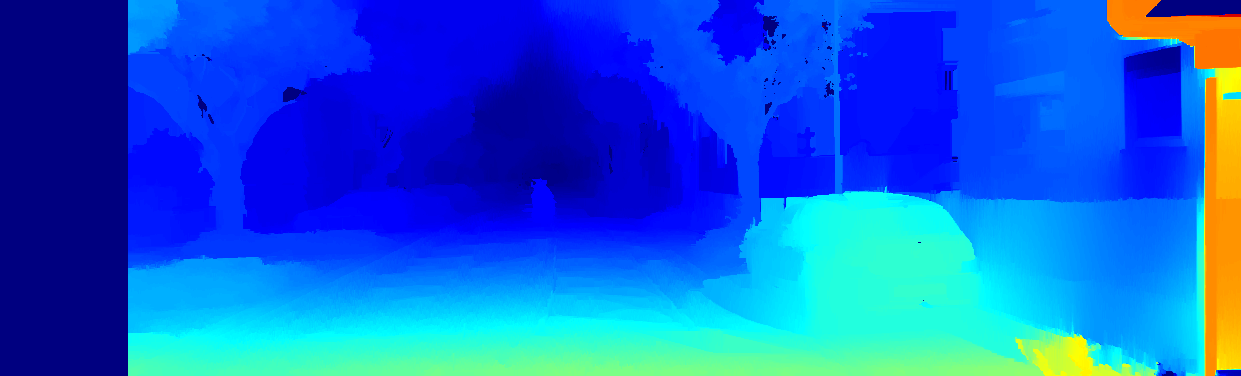
Reference: “Fast Global Image Smoothing Based on Weighted Least Squares”, 大意是使用加权最小二乘算法进行优化,使得图像全局平滑的同时能够进行边缘的保持, 与双边滤波的整体功能相近, 可以看到在经过后处理后,视差图更加平滑,轮廓更加清晰
- 利用开源的monodepth,不加任何参数修改的进行训练,然后推断上面图片对应的深度结果(https://github.com/OniroAI/MonoDepth-PyTorch):
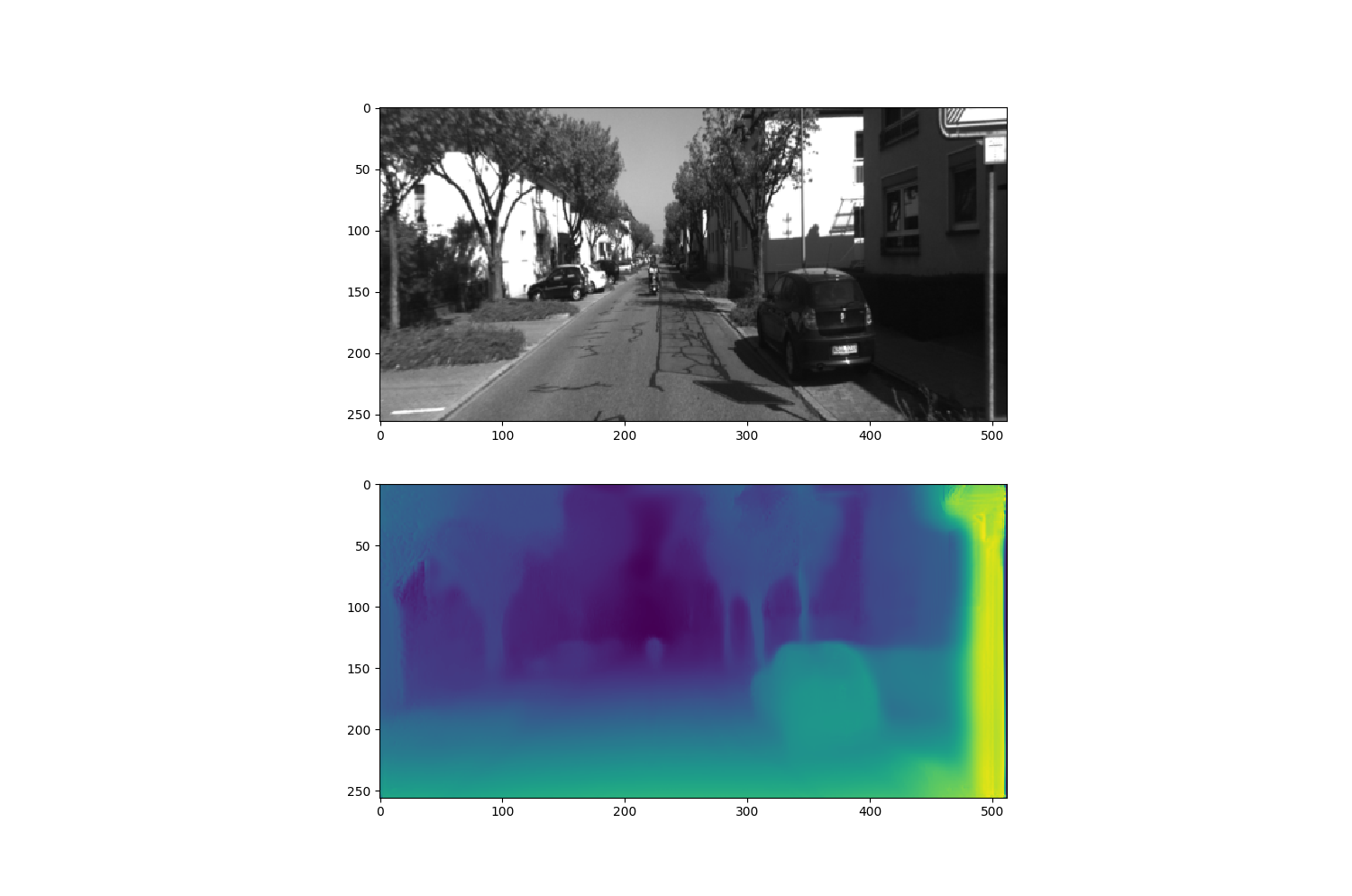
从上图中可以看出,在整体表现上,深度学习方法要优于传统方法(The overall performance outperforms by a larger marjin then traditional SGM method)
- SGM整个算法流程如下:
- Census-Transform 将原始图像转换为census图像,为了便于匹配代价体计算
- Compute-Cost 通过两幅census图像进行初始的匹配成本计算
- Cost-Aggregation 代价体聚合, ‘key step’
- Compute-Disparity 基于聚合后的代价体进行每个像素的视差值计算
- LR-Check 左右视差一致性检查 (optional)
- Remove-Sparkles 零散的斑点移除(optional)
- Fill-Holes 空洞填充(optional)
- Middle-Filter 中值滤波去噪平滑
其中1-4是基本步骤, 5-8为视差优化步骤
分别对每一步进行阐述:
census transform H 老爷子最早的匹配代价选择的是MI(互信息),但相对于census-transform其计算效率比较低,所以主流方式变成了census变换. 所谓census image就是通过census-transform将原始图像逐像素变换得到的,每个像素的census值是明暗相对关系比较的一个比特串。 ok, 以一个例子简单说明,加入选择的census的窗口是3*3, 有这样的一个小的image patch:
[1, 4, 6] [2, 5, 8] [1, 9, 3]
那中间像素5的census值为(110100101), 这个二进制比特串所代表的十进制数字421就是对应的census image的像素值. 所有经过census变换后可以分别得到左图的census image和右图的census image
reference: https://www.cnblogs.com/riddick/p/7295581.html
compute cost 匹配代价成本计算
这一步的过程主要是为了构建初始代价立方体,注意是三维的立方体
print(cost_init_.shape) [D, H, W]其中D为disparity range, H为图像高度,W为图像宽度
ok,现在的输入是census_left, 一个二维矩阵, census_right, 一个二维矩阵,想要的输出是cost_init, 一个三维矩阵, 如何构造,不失一般性的公式如下:
cost_init[k, j, i] = hamming_dist(census_left[j, i], census_right[j, i - k])
计算当前像素在每个视差下的汉明距离作为度量,这里汉明距离的计算有个面试点分享给有需要的同学:
int SGMUtils::hamming_dist(const unsigned int census_x, const unsigned int census_y){ int dist = 0; int val = census_x ^ census_y; while(val) { dist++; val &= (val - 1); } return dist; }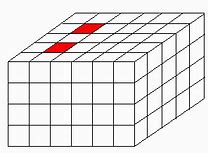
cost_init_volume(代价立方体)
横方向代表图像列,纵方向代表图像行,朝里的方向代表深度范围, 当代价体构造好之后,如果不进行关键的代价聚合, 也可以进行视差计算, 这里先跳过代价聚合,直接基于代价体进行视差计算.
compute-disparity
视差计算的方法很直观,对于代价体中的每个像素,在视差方向进行遍历,当前像素的视差满足对应的代价最小这一原则,三重循环过后,可以生成相应的视差图,也就是所谓的WTA(winner take all)准则。经过上面简单的几步, 可以获得如下的结果,来自明德学院的经典的左右样图:



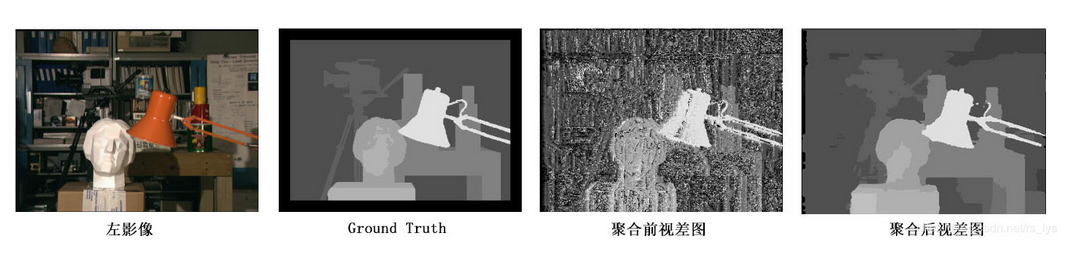
代价聚合
现在讨论下最关键的代价聚合步骤,这一步是sgm的灵魂,先看下效果
目前常用的代价聚合有4path聚合和8path聚合, 4路聚合包括从上到下, 从下到上, 从左往右, 从右往左, 8路聚合增加了45度方向和135度方向的聚合路径,路径聚合的目的就是不仅考虑局部的代价信息, 还要加入全局的平滑信息,只是用多个方向一维的聚合来对二维进行近似,精度相似,效率大幅度提升(这句话是否很多时候都可以听到)
以四路聚合为例,会分别得到四个聚合的代价立方体,将其相加得到最终的代价立方体:
for(sint32 i =0;i<size;i++) {
cost_aggr_[i] = cost_aggr_1_[i] + cost_aggr_2_[i] + cost_aggr_3_[i] + cost_aggr_4_[i];
if (option_.num_paths == 8) {
cost_aggr_[i] += cost_aggr_5_[i] + cost_aggr_6_[i] + cost_aggr_7_[i] + cost_aggr_8_[i];
}
}
这里的size = width * height * disparity_range
以1路聚合,方向从左到右为例,看看如何得到其对应的代价立方体
代价立方体某一元素的计算公式: 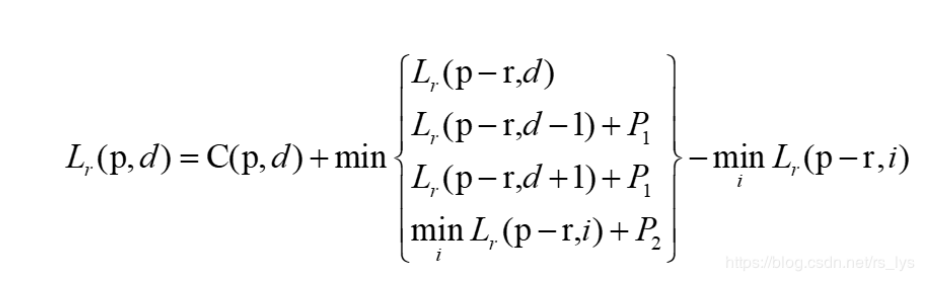
其中p代表像素位置, d代表视差值, r是移动的路径,在当前例子中为从左到右,所以当前的Lr 为代码中的cost_aggr_1_, 代表聚合后的代价立方体,C为初始代价立方体, 公式的含义翻译成中文就是:
聚合后的代价立方体中像素p,视差d位置处的值 = 这个位置的初始代价值 + min(L1, L2, L3, L4) - L4
其中:
L1 代表当前立方体像素p-r处,视差d位置处的值,在从左到右的例子中则代表当前像素左侧的像素
L2 代表同样的左侧像素, 但视差为d-1位置处的代价值, 再加上p1惩罚项 (小小的对视差变化1进行惩罚)
L3 代表同样的左侧像素, 视差为d+1位置处的代价值,再加上p1惩罚项 (小小的对视差变化1进行惩罚)
L4 代表同样的当前像素的左侧像素,所有视差位置(disparity channel)中的代价最小值, 再加上p2惩罚项 (视差变化较大, 对应大一点的惩罚)
其中
p2 = p2_init / (I(p) - I(p-r))
灰度变化越大,相应的惩罚会越小, 为什么呢?
- 在物体的边界处,深度会发生很大变化,对应的视差也会发生很大变化,这时候的惩罚应该要小一点,所以要除以灰度的变化值来抑制惩罚项。这样设计的聚合代价不仅包括了原始匹配代价,也包括了视差变化(平滑项的代价)

经过上面的一通操作,可以得到最终想要的聚合代价立方体,然后基于代价立方体再进行后面的最优视差计算等。说完了代价聚合的整个过程,再看看理论上为何要做这个?与全局算法相似,sgm希望能做到全局最优,意味着希望当每个像素的视差值确定之后,整体上的能量函数达到最优:
E(d) = E_data(d) + E_smooth(d)
其中第一项是匹配代价能量,第二项是表面连续性的平滑约束
所以核心问题就是如何求解这个二维最优问题,SGM没有直接求解,采用了单方向聚合一维近似的方法求解,也可以理解为一种一维的动态规划.
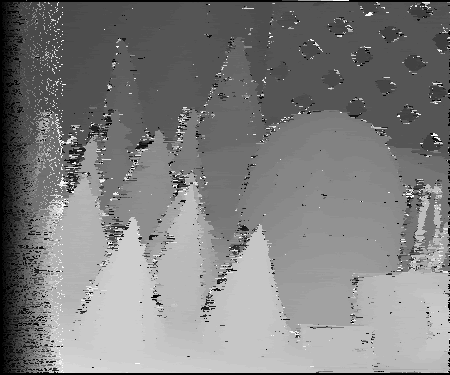
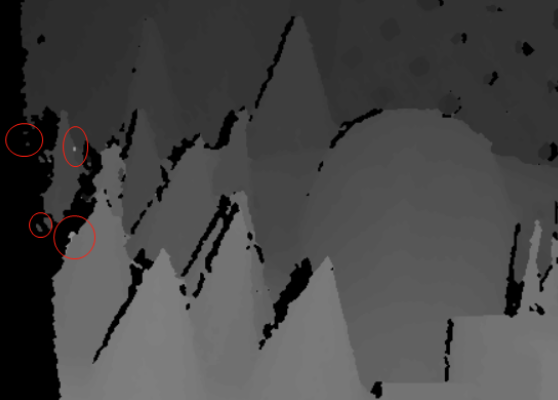
只经过从左到右的一路聚合,形成的视差图如下:

只作四路聚合后的视差图:
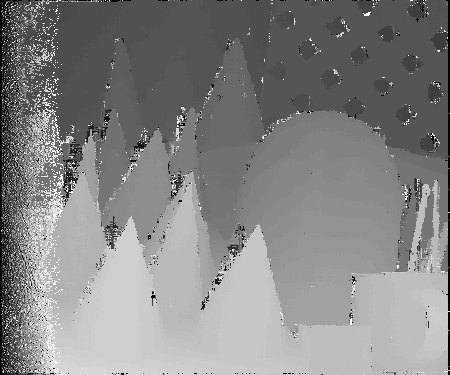
相比于不进行代价聚合,可以看到聚合这一灵魂一步的巨大作用. 一般来说,追求效率的话四路就足够了,若希望能够更好的效果,则可以选择8路聚合。可以看到经过聚合后,已经有了基本的样子,后续的所有操作都是对聚合后的视差图进行优化处理,优化处理中的很多步骤都可以根据实际情况进行合理的取舍. OK, 现在可以进入繁杂细碎的视差优化处理阶段
5 – 8 视差优化
视差优化的目的:提高视差精度,剔除错误视差,使得视差值精确,可靠
2-4均是为了剔除掉错误视差,同时要保持左右一致性和唯一性。加入视差图的中值滤波可以去掉视差噪声,采用双边滤波也可以,可以同时保持边缘的精度,但效率稍低
视差优化部分包括的子模块:
子像素拟合 3个点 (x1, y1), (x2, y2), (x3, y3)抛物线拟合,求最小值或最大值 (初1数学),高考后,数学回到了小学水平。。。
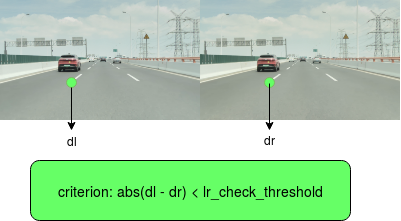
左右一致性检查
LR check, 左右影像同名像素的视差应该一致, 若二者的差大于一定的阈值,则将这一像素的视差置为无效值
dl = Left_Disparity(i,j)
dr = Right_Disparity(i, j - dl)
左右一致性检查的图形含义为:
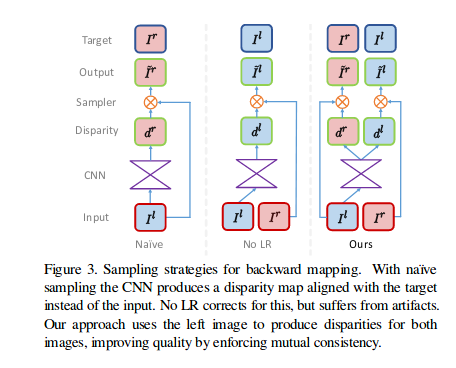
下图为monodepth中的左右一致性损失,不同于SGM中同名点像素距离损失,monodepth等深度学习方法采用的是根据右目图像和左目视差生成虚拟左目,和真实的左目构造灰度域(appearence)上的loss,类似于slam中的直接法中的光度误差
问题来了,右视差图如何生成? 1) 通过左影像聚合代价立方体生成右影像聚合代价立方体
right_cost_aggr[d, h, w] = left_cost_aggr[d, h ,w+d]
2) 根据右影像聚合代价立方体生成右影像视差图, 如步骤4
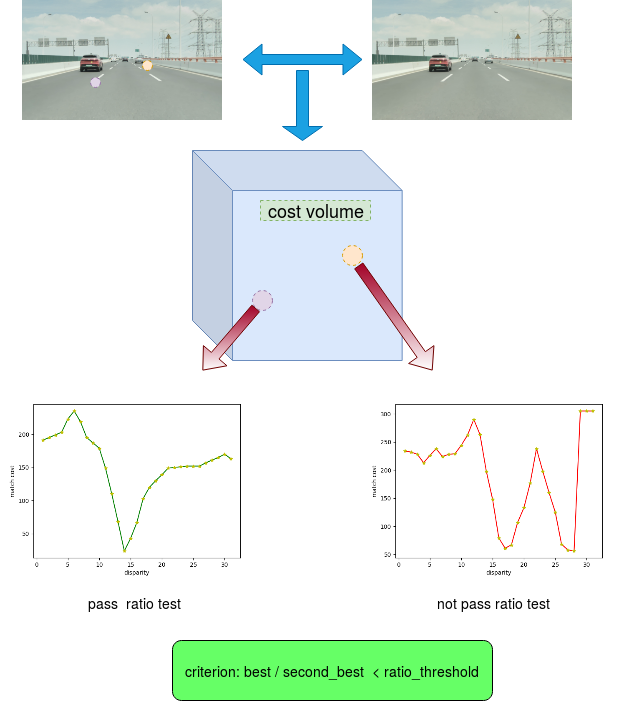
- 唯一性约束(ratio test) ratio = best_score / second_score 如果唯一性没有那么的显著,则将当前视差值置为无效值
note: 这也是特征点匹配中常用的一种鲁棒化策略, 其对应的图形含义为:
- 小连通区域剔除
存在一些小的连通域,与物体的整体视差很不协调,这样的连通域,一般的滤波又很难弄掉它,所以使用一种区域跟踪的方法,寻找灰度变化在一定范围内的区域,这样的区域面积如果小于一定的阈值,则将区域内的所有像素的视差置为无效值
method: 深度优先遍历,寻找连通区域 (DFS)
中值滤波 去掉不合群的值 (middle filter)
弱纹理区优化
空洞填补(视差填充) 按照实际的需求来确定是否需要进行视差填充, 如果要求每个像素都尽量精确, 而不要求完整,那就不需要做视差填充,如果要求视差图完整,而对精确性要求不高,那就需要做视差填充.区分遮挡区域和误匹配区域,对于遮挡区域,用背景像素的视差进行填充,对于误匹配区域,取周围视差的中值
- 和monodepth等学习方法的比较

loss项总共有3项, 第一项appearance matching loss:

光度误差 + 结构相似度误差,本质上和sgm中汉明距离的匹配代价是等效的。
第二项Disparity Smooth Loss:
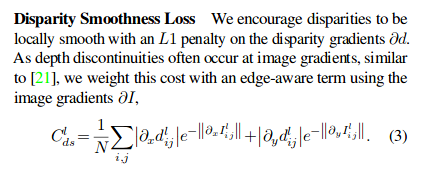
从公式中可以定性的看出 平滑性loss与视差的变化成正比,与图像的梯度成指数反比,公式所阐述的现实物理含义是不希望在平坦区域视差会有大的变化,但又不能压制在物体边界区域视差应该有较大的突变这样一个事实,sgm中的灵魂一步“代价聚合”不就做的是这样一件事情么?
第三项Left-Right Disparity Consistency Loss:
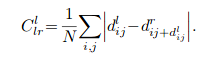
sgm中的左右一致性检查在monodepth里面得到的应用
看了上面的几个技术点的比较,是否觉得所谓的monodepth也只是sgm技术集中的子集,在深度学习的背景下,采用各种方式对sgm中的东西进行包装,使其能够运行在学习的范式之下,从而能够以巨量参数的形式对深度进行估计。借助于深度学习强大的表达能力,视差估计的精度显著提升。但不可否认,深度学习方法可能会存在一些泛化性问题
- loss 层面的tight fuse
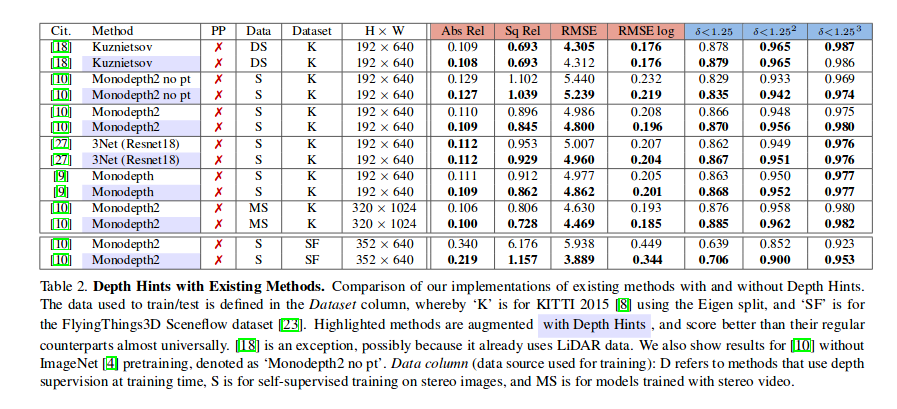
同时monodepth有很多sgm中的东西没有包装,是否有进一步发展的可能?同时我们也可以看到,推出monodepth2的组织nianticlabs(https://github.com/nianticlabs)去年也推出了新的改进版本,depth hints,(https://arxiv.org/pdf/1909.09051.pdf),通过在训练过程中融合sgm的监督信息,更好的深度估计结果:

以上是关于立体匹配的个人简单总结,如果对您的工作研究产生帮助,将是我最大的荣幸,有任何问题,欢迎与我联系。
cell phone: 13162517010
email: candyguo_fly@163.com
如果你觉得这篇blog对你产生了帮助,可以考虑sponsor me, 让我可以更有动力进行博客的更新
