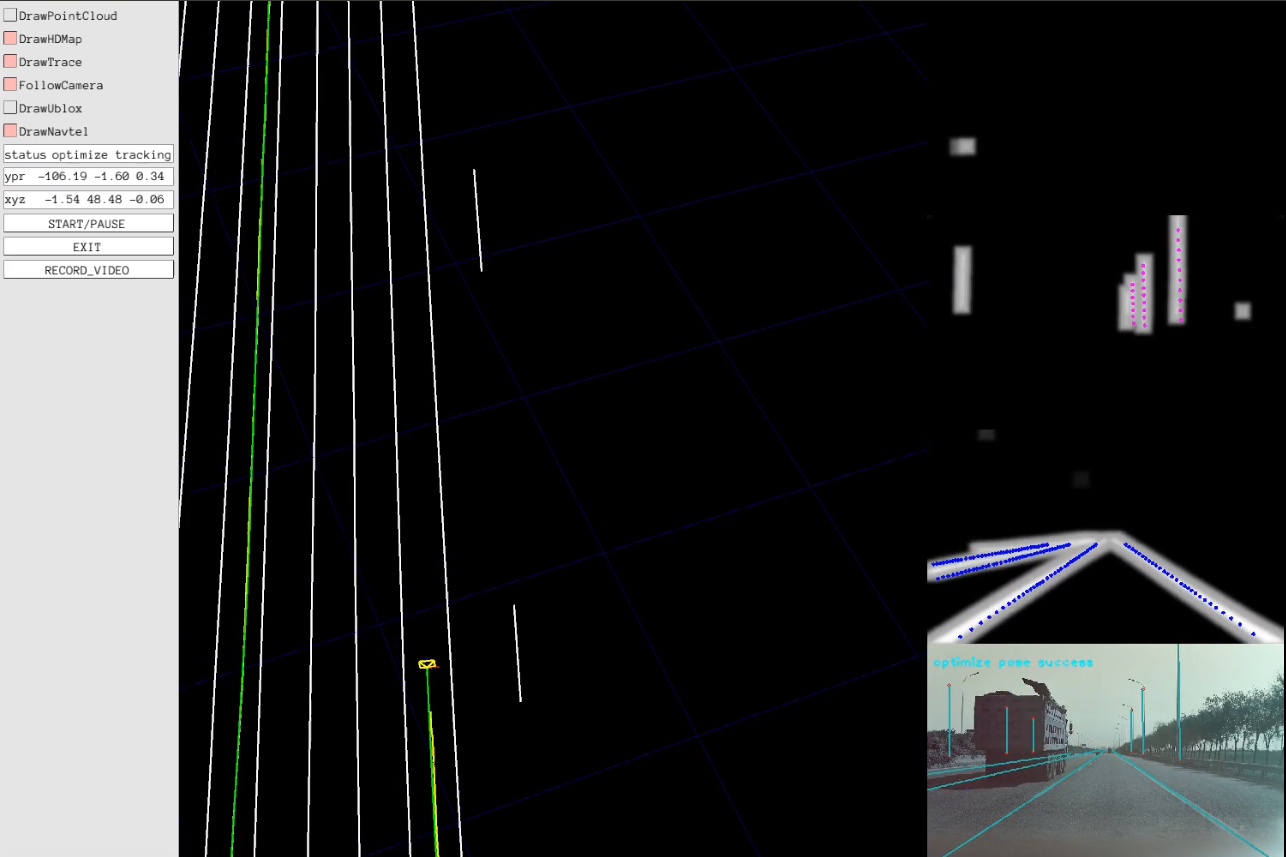
Hdmap-localization实时高精度定位是一件极具挑战性的事情,在无人驾驶及其他领域内,在一定精度范围内确定载体相对于某个坐标框架的位置 是一个必要条件。在这里,我们建立了一种基于几何语义地图的定位方法,利用深度学习方法从单目视觉传感器中提取环境元素,建立其与预构建的场景描述地图之间的匹配关系,从而完成载体位姿态的实时估计 method diagramShare on Twitter Facebook LinkedIn Previous Next
 method diagram
method diagram